通过ROS的Message控制舵机角度(Python)¶
创建包¶
ROS Wiki - Creating a ROS Package
进入文件夹,
创建包,
创建Message¶
官方文档参考: ROS wiki - msg
创建文件夹¶
在fashionstar_uart_servo_ros1工程内新建msg 文件夹,放置Message
创建Message文件¶
标准信息格式支持如下
- int8,int16,int32,int64
- float32,float64
- string
- 其他自定义msg:package/MessageName
- 不定长array[ ]以及定长array[N]
创建一个自己的Message格式,
SetServoAngle.msg
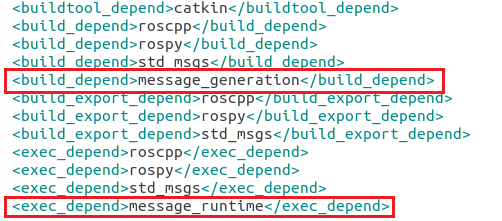
配置pakcage.xml¶
添加如下两行:
构建的时候生成message的依赖,
运行的时候message依赖,
配置CMakeLists.txt¶
配置find_package
## Find catkin macros and libraries
## if COMPONENTS list like find_package(catkin REQUIRED COMPONENTS xyz)
## is used, also find other catkin packages
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
message_generation # Message生成依赖
)
注册.msg 文件
## Generate messages in the 'msg' folder
## 这里添加msg文件夹下的msg文件名称
add_message_files(
FILES
SetServoAngle.msg
)
添加生成message的时候需要的依赖
## Generate added messages and services with any dependencies listed here
generate_messages(
DEPENDENCIES
std_msgs
)
配置catkin,CATKIN_DEPENDS 里面添加message_runtime
###################################
## catkin specific configuration ##
###################################
## The catkin_package macro generates cmake config files for your package
## Declare things to be passed to dependent projects
## INCLUDE_DIRS: uncomment this if your package contains header files
## LIBRARIES: libraries you create in this project that dependent projects also need
## CATKIN_DEPENDS: catkin_packages dependent projects also need
## DEPENDS: system dependencies of this project that dependent projects also need
catkin_package(
INCLUDE_DIRS include
LIBRARIES fashionstar_uart_servo_ros1
CATKIN_DEPENDS message_runtime roscpp rospy std_msgs
DEPENDS system_lib
)
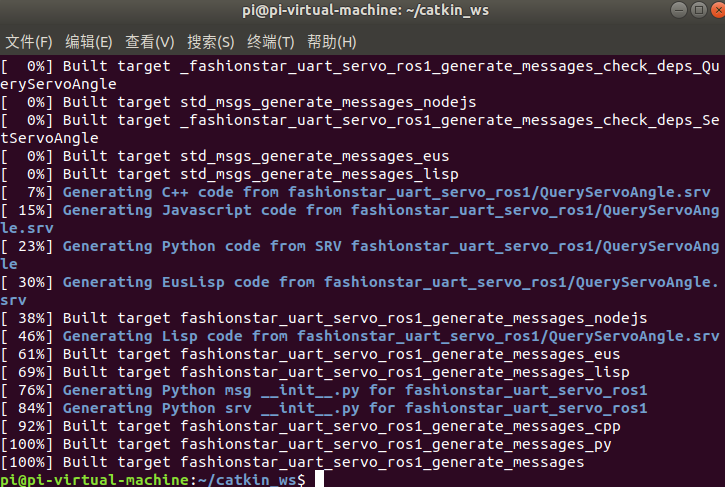
构建Message¶
使用rosmsg查看创建的msg¶
指令格式
示例:
kyle@turing:~/catkin_ws$ rosmsg show SetServoAngle
[fashionstar_uart_servo_ros1/SetServoAngle]:
uint8 id
float32 angle
Python节点-消息接收者¶
fashionstar_uart_servo_ros1工程文件里面,创建Python脚本的文件夹scripts
将Python2版本的uservo.py拷贝到scripts 文件夹里面
并创建一个串口总线舵机的Python节点 uservo_demo_node.py
赋予其执行权限
uservo_demo_node.py
#!/usr/bin/env python
#coding:utf-8
'''
舵机控制节点
'''
import rospy
import serial
from fashionstar_uart_servo_ros1.msg import SetServoAngle
def set_servo_angle_callback(data):
'''回调函数-设置舵机角度'''
rospy.loginfo("[Recv] Servo ID ={} Set Angle={}".format(data.id, data.angle))
def uart_manager():
# 初始化节点
rospy.init_node('uservo_node', anonymous=True)
# 舵机角度订阅者
rospy.Subscriber("set_servo_angle", SetServoAngle, set_servo_angle_callback)
# 持续等待, 直到节点结束
rospy.spin()
if __name__ == '__main__':
uart_manager()
注意: 文件头必须有如下声明
否则运行的时候会遇到报错
kyle@turing:~/catkin_ws$ rosrun fashionstar_uart_servo_ros1 uservo_demo_node.py
import-im6.q16: not authorized `rospy' @ error/constitute.c/WriteImage/1037.
from: can't read /var/mail/fashionstar_uart_servo_ros1.msg
/home/kyle/catkin_ws/src/fashionstar_uart_servo_ros1/scripts/uservo_node.py: line 6: syntax error near unexpected token `('
/home/kyle/catkin_ws/src/fashionstar_uart_servo_ros1/scripts/uservo_node.py: line 6: `def set_servo_angle_callback(data):'
Python节点-消息发送者¶
创建另外一个文件test_set_angle_node.py 并赋予其可执行权限
test_set_angle_node.py
#!/usr/bin/env python
#coding:utf-8
'''
电机角度控制测试节点
'''
import rospy
from fashionstar_uart_servo_ros1.msg import SetServoAngle
SERVO_ID = 0 # 测试的电机ID
def test_set_servo_angle():
'''回调函数'''
# 创建节点
rospy.init_node('test_set_angle_node', anonymous=True)
# 创建发布者
# - Topic名称为: 'set_servo_angle'
# - Message格式类型: set_servo_angle
# - queue_size 消息队列尺寸,自定义
pub = rospy.Publisher('set_servo_angle', SetServoAngle, queue_size=2)
# 设置发送节拍 0.2HZ
rate = rospy.Rate(0.2)
# 电机角度
angle = 90.0
# 创建信息对象
msg = SetServoAngle()
while not rospy.is_shutdown():
# 修改电机角度
angle *= -1.0
# 填充Message
msg.id = SERVO_ID
msg.angle = angle
rospy.loginfo('Set Servo {} = {}'.format(msg.id, msg.angle))
pub.publish(msg)
rate.sleep()
if __name__ == '__main__':
test_set_servo_angle()
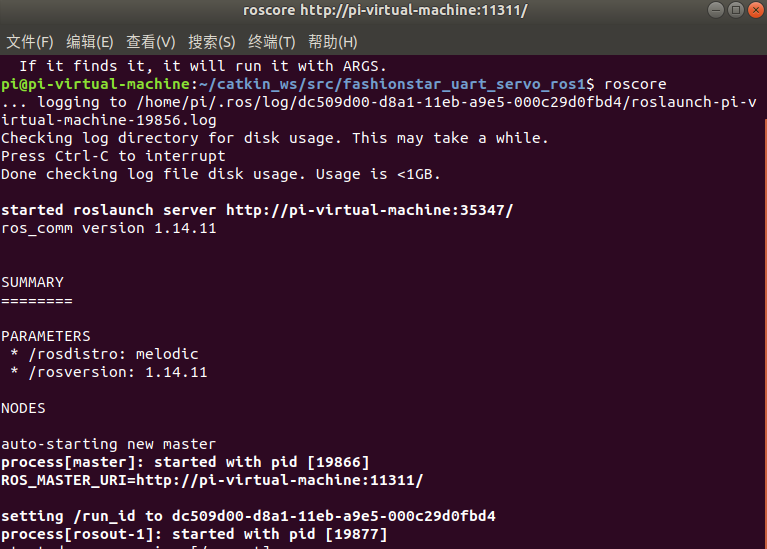
运行例程¶
运行Master节点
运行舵机服务节点(接收者)
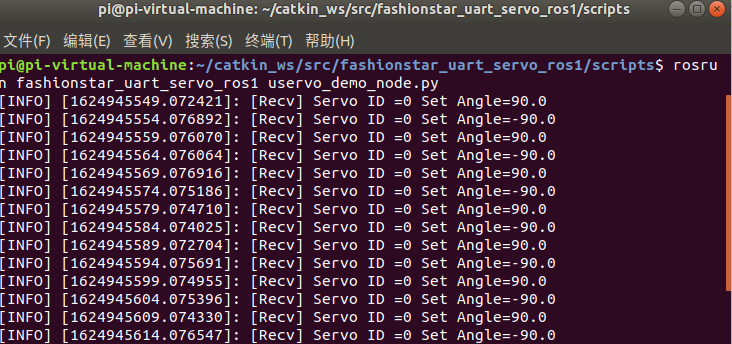
运行舵机角度控制测试节点(发送者)
注:若提示/dev/ttyUSB0 permission denied,请运行以下指令:
控制舵机¶
修改uservo_demo_node.py文件,导入FashionStar 舵机Python2的SDK,驱动舵机转动起来。
可以根据自己的需求定制角度控制的具体的参数,例如指定时间/功率/转速等等,具体的API请参阅舵机Python SDK使用手册。
#!/usr/bin/env python
#coding:utf-8
'''
舵机控制节点
'''
import rospy
import serial
from uservo import UartServoManager
from fashionstar_uart_servo_ros1.msg import SetServoAngle
# 参数配置
# 角度定义
SERVO_PORT_NAME = u'/dev/ttyUSB0' # 舵机串口号 <<< 修改为实际串口号
SERVO_BAUDRATE = 115200 # 舵机的波特率
SERVO_ID = 0 # 舵机的ID号
SERVO_HAS_MTURN_FUNC = False # 舵机是否拥有多圈模式
# 初始化串口
uart = serial.Serial(port=SERVO_PORT_NAME, baudrate=SERVO_BAUDRATE,\
parity=serial.PARITY_NONE, stopbits=1,\
bytesize=8,timeout=0)
# 初始化舵机管理器
uservo = UartServoManager(uart)
def set_servo_angle_callback(data):
'''回调函数-设置舵机角度'''
rospy.loginfo("[Recv] Servo ID ={} Set Angle={}".format(data.id, data.angle))
uservo.set_servo_angle(data.id, data.angle, interval=0)
def uart_manager():
# 初始化节点
rospy.init_node('uservo_node', anonymous=True)
# 舵机角度订阅者
rospy.Subscriber("set_servo_angle", SetServoAngle, set_servo_angle_callback)
# 持续等待, 直到节点结束
rospy.spin()
if __name__ == '__main__':
uart_manager()