总线伺服舵机SDK使用手册(Python)¶
1.概述¶
本SDK内容有
- 基于总线伺服舵机通信协议的Python的API函数,适用于所有总线伺服舵机型号。
注:有些指令仅支持特定规格舵机
1.1.上位机软件¶
上位机软件可以调试总线伺服舵机,测试总线伺服舵机的功能。
- 上位机软件:FashionStar UART总线伺服舵机上位机软件
- 使用说明:总线伺服舵机上位机软件使用说明
1.2.SDK¶
本文例程、API下载。
- Python_SDK下载链接:SDK for Python
1.3.图例¶
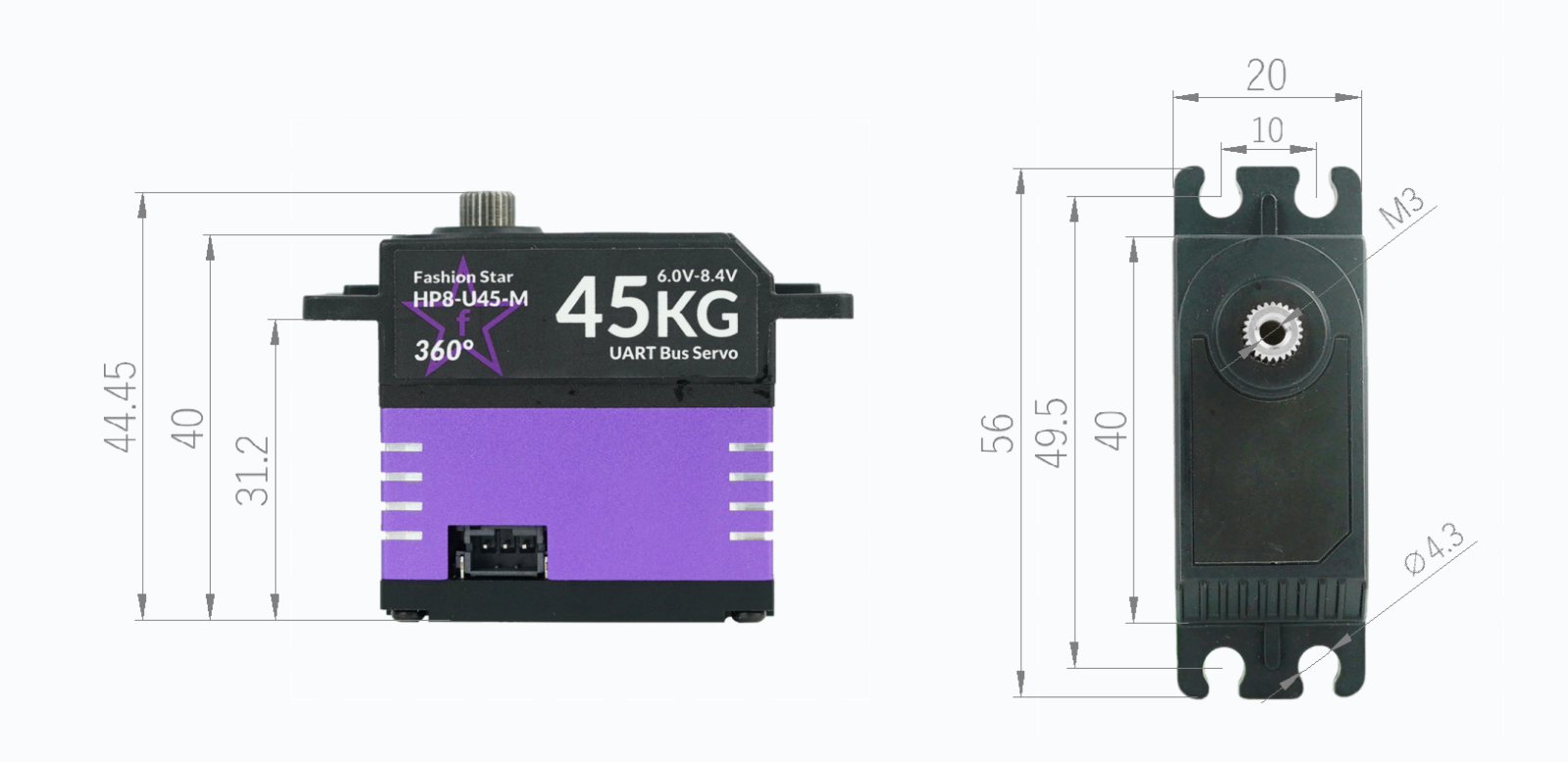
HP8-U45-M总线伺服舵机
总线伺服舵机转接板UC-01

2.接线说明¶
- 安装USB转TTL模块的驱动程序。
- 将TTL/USB调试转换板UC-01与控制器、总线伺服舵机以及电源连接。
3.创建总线伺服舵机管理器¶
总线伺服舵机的文件路径fashionstar-uart-servo-python/src/uservo.py, 使用的时候可以将uservo.py 拷贝至你当前工程文件夹里面。
或者使用的时候,将uservo.py所在的文件夹添加到系统路径里面, 相对路径/绝对路径都可以。
然后使用的过程中一般需要导入如下这两个依赖
接下来要创建串口对象,指定相关的参数
# 参数配置
# 角度定义
SERVO_PORT_NAME = 'COM7' # 舵机串口号
SERVO_BAUDRATE = 115200 # 舵机的波特率
SERVO_ID = 0 # 舵机的ID号
# 初始化串口
uart = serial.Serial(port=SERVO_PORT_NAME, baudrate=SERVO_BAUDRATE,\
parity=serial.PARITY_NONE, stopbits=1,\
bytesize=8,timeout=0)
创建舵机管理器,将串口对象传入到构造器UartServoManager里面.
4.舵机通讯检测¶
4.1.API-ping¶
调用舵机的ping() 函数用于舵机的通信检测, 判断舵机是否在线。
函数原型
输入参数
servo_id: 舵机ID
输出参数
is_online: 舵机是否在线
4.2.例程源码¶
example/ping
'''
伺服总线舵机
> Python SDK舵机通讯检测 Example <
--------------------------------------------------
* 作者: 深圳市华馨京科技有限公司
* 网站:https://fashionrobo.com/
* 更新时间: 2023/03/13
--------------------------------------------------
'''
# 添加uservo.py的系统路径
import sys
sys.path.append("../../src")
# 导入依赖
import time
import serial
from uservo import UartServoManager
# 参数配置
# 角度定义
SERVO_PORT_NAME = 'COM7' # 舵机串口号
SERVO_BAUDRATE = 115200 # 舵机的波特率
SERVO_ID = 0 # 舵机的ID号
# 初始化串口
uart = serial.Serial(port=SERVO_PORT_NAME, baudrate=SERVO_BAUDRATE,\
parity=serial.PARITY_NONE, stopbits=1,\
bytesize=8,timeout=0)
# 初始化舵机管理器
uservo = UartServoManager(uart)
# 舵机通讯检测
is_online = uservo.ping(SERVO_ID)
print("舵机ID={} 是否在线: {}".format(SERVO_ID, is_online))
5.舵机阻尼模式¶
5.1.API-set_damping¶
设置舵机为阻尼模式。
函数原型
输入参数
servo_id: 舵机IDpower: 舵机功率,单位mW
输出参数
- 无
5.2.例程源码¶
example/damping
'''
伺服总线舵机
> Python SDK 舵机阻尼模式 <
--------------------------------------------------
* 作者: 深圳市华馨京科技有限公司
* 网站:https://fashionrobo.com/
* 更新时间: 2023/03/13
--------------------------------------------------
'''
# 添加uservo.py的系统路径
import sys
sys.path.append("../../src")
# 导入依赖
import time
import serial
from uservo import UartServoManager
# 参数配置
# 角度定义
SERVO_PORT_NAME = 'COM7' # 舵机串口号
SERVO_BAUDRATE = 115200 # 舵机的波特率
SERVO_ID = 0 # 舵机的ID号
# 初始化串口
uart = serial.Serial(port=SERVO_PORT_NAME, baudrate=SERVO_BAUDRATE,\
parity=serial.PARITY_NONE, stopbits=1,\
bytesize=8,timeout=0)
# 初始化舵机管理器
uservo = UartServoManager(uart)
power = 500 # 阻尼模式下的功率, 单位mW
uservo.set_damping(SERVO_ID, power)
6.舵机角度读取¶
6.1.API-query_servo_angle¶
函数原型
输入参数
servo_id: 舵机ID
输出参数
angle: 舵机角度(单圈/多圈)
注意事项
注意这里返回的角度是多圈模式的角度还是单圈模式的角度,取决于上次控制舵机的角度的指令是单圈模式还是/多圈模式, 默认为单圈。
如果想人为的设定查询多圈/单圈,可以在查询之前设定uservo.servos[servo_id].is_mturn 这个布尔值。
is_mturn=True: 返回多圈角度is_mturn=False: 返回单圈角度
6.2.例程源码¶
设置舵机为阻尼模式,转动舵机 1s打印一下当前的角度。
`example/query_servo_angle
'''
伺服总线舵机
> Python SDK舵机角度查询 Example <
--------------------------------------------------
* 作者: 深圳市华馨京科技有限公司
* 网站:https://fashionrobo.com/
* 更新时间: 2023/03/13
--------------------------------------------------
'''
# 添加uservo.py的系统路径
import sys
sys.path.append("../../src")
# 导入依赖
import time
import serial
from uservo import UartServoManager
# 参数配置
# 角度定义
SERVO_PORT_NAME = 'COM7' # 舵机串口号
SERVO_BAUDRATE = 115200 # 舵机的波特率
SERVO_ID = 0 # 舵机的ID号
# 初始化串口
uart = serial.Serial(port=SERVO_PORT_NAME, baudrate=SERVO_BAUDRATE,\
parity=serial.PARITY_NONE, stopbits=1,\
bytesize=8,timeout=0)
# 初始化舵机管理器
uservo = UartServoManager(uart)
# 设置舵机为阻尼模式
uservo.set_damping(SERVO_ID, 200)
# 舵机角度查询
while True:
angle = uservo.query_servo_angle(SERVO_ID)
print("当前舵机角度: {:4.1f} °".format(angle), end='\r')
time.sleep(1)
7.舵机角度控制¶
7.1.API-set_servo_angle¶
设置舵机角度,这个API包含了6种舵机角度控制模式,通过传入不同的参数调用不同的指令。
函数原型
def set_servo_angle(self, servo_id:int, angle:float, is_mturn:bool=False, interval:float=None, velocity:float=None, t_acc:int=20, t_dec:int=20, power:int=0, mean_dps:float=100.0):
输入参数
servo_id: 舵机的ID号angle: 目标角度 (单圈控制范围[-180°,180°],多圈控制范围[-368,640.0° , 368,640.0°])is_mturn: 是否是多圈模式interval: 中间间隔,单位msvelocity: 舵机的目标转速,单位dpst_acc: 加速时间,启动时加速段的时间。单位mst_dec: 减速时间,运动到接近目标的减速段时间。单位mspower: 功率限制,单位mWmean_dps: 平均转速,单位dps,用于估计interval
输出参数
- 无
7.2.API-wait¶
等待所有的舵机到达目标角度。
函数原型
输入参数
timeout: 阻塞式等待的超时判断阈值,单位ms
输出参数
- 无
7.3.例程源码¶
example/set_servo_angle
'''
伺服总线舵机
> 设置舵机角度 <
--------------------------------------------------
* 作者: 深圳市华馨京科技有限公司
* 网站:https://fashionrobo.com/
* 更新时间: 2023/03/13
--------------------------------------------------
'''
# 添加uservo.py的系统路径
import sys
sys.path.append("../../src")
# 导入依赖
import time
import struct
import serial
from uservo import UartServoManager
# 参数配置
# 角度定义
SERVO_PORT_NAME = 'COM6' # 舵机串口号
SERVO_BAUDRATE = 115200 # 舵机的波特率
SERVO_ID = 0 # 舵机的ID号
# 初始化串口
uart = serial.Serial(port=SERVO_PORT_NAME, baudrate=SERVO_BAUDRATE,\
parity=serial.PARITY_NONE, stopbits=1,\
bytesize=8,timeout=0)
# 初始化舵机管理器
uservo = UartServoManager(uart, is_debug=True)
print("[单圈模式]设置舵机角度为90.0°")
uservo.set_servo_angle(SERVO_ID, 90.0, interval=0) # 设置舵机角度 极速模式
uservo.wait() # 等待舵机静止
print("-> {}".format(uservo.query_servo_angle(SERVO_ID)))
print("[单圈模式]设置舵机角度为-80.0°, 周期1000ms")
uservo.set_servo_angle(SERVO_ID, -80.0, interval=1000) # 设置舵机角度(指定周期 单位ms)
uservo.wait() # 等待舵机静止
print("-> {}".format(uservo.query_servo_angle(SERVO_ID)))
print("[单圈模式]设置舵机角度为70.0°, 设置转速为200 °/s, 加速时间100ms, 减速时间100ms")
uservo.set_servo_angle(SERVO_ID, 70.0, velocity=200.0, t_acc=100, t_dec=100) # 设置舵机角度(指定转速 单位°/s)
uservo.wait() # 等待舵机静止
print("-> {}".format(uservo.query_servo_angle(SERVO_ID)))
print("[单圈模式]设置舵机角度为-90.0°, 添加功率限制")
uservo.set_servo_angle(SERVO_ID, -90.0, power=400) # 设置舵机角度(指定功率 单位mW)
uservo.wait() # 等待舵机静止
#########################################################################################
print("[多圈模式]设置舵机角度为900.0°, 周期1000ms")
uservo.set_servo_angle(SERVO_ID, 900.0, interval=1000, is_mturn=True) # 设置舵机角度(指定周期 单位ms)
uservo.wait() # 等待舵机静止
print("-> {}".format(uservo.query_servo_angle(SERVO_ID)))
print("[多圈模式]设置舵机角度为-900.0°, 设置转速为200 °/s")
uservo.set_servo_angle(SERVO_ID, -900.0, velocity=200.0, t_acc=100, t_dec=100, is_mturn=True) # 设置舵机角度(指定转速 单位°/s) dps: degree per second
uservo.wait() # 等待舵机静止
print("-> {}".format(uservo.query_servo_angle(SERVO_ID)))
print("[多圈模式]设置舵机角度为-850.0°, 添加功率限制")
uservo.set_servo_angle(SERVO_ID, -850.0, power=400, is_mturn=True) # 设置舵机角度(指定功率 单位mW)
uservo.wait() # 等待舵机静止
print("-> {}".format(uservo.query_servo_angle(SERVO_ID)))
8.清除当前圈数¶
该API用于清除当前舵机圈数,须在失锁状态下使用。
函数原型
输入参数
servo_id: 舵机的ID
输出参数
- 无
9.轮转模式(316版本以及后续版本已弃用)¶
9.1.API-wheel_stop¶
轮转模式停止转动。
函数原型
输入参数
servo_id: 舵机ID
输出参数
- 无
9.2.API-set_wheel_norm¶
设置轮转普通模式,转速单位: °/s
函数原型
输入参数
servo_id: 舵机IDis_cw: 是否是顺时针:True: 顺时针,False: 逆时针mean_dps: 平均转速
输出参数
- 无
9.3.API-set_wheel_turn¶
轮转模式,让舵机旋转特定的圈数。
函数原型
输入参数
servo_id: 舵机IDturn: 目标要旋转的圈数is_cw: 旋转方向,是否为顺时针True: 顺时针False: 逆时针mean_dps: 平均转速is_wait: 是否是阻塞式等待
输出参数
- 无
9.4.API-set_wheel_time¶
轮转模式,旋转特定的时间。
函数原型
输入参数
servo_id: 舵机IDinterval: 目标要旋转的时间, 单位msis_cw: 旋转方向,是否为顺时针True: 顺时针False: 逆时针mean_dps: 平均转速, 单位dpsis_wait: 是否是阻塞式等待
输出参数
- 无
9.5.例程源码¶
example/wheel
'''
伺服总线舵机
> Python SDK 舵机轮转模式测试 <
--------------------------------------------------
* 作者: 深圳市华馨京科技有限公司
* 网站:https://fashionrobo.com/
* 更新时间: 2023/03/13
--------------------------------------------------
'''
# 添加uservo.py的系统路径
import sys
sys.path.append("../../src")
# 导入依赖
import time
import serial
from uservo import UartServoManager
# 参数配置
# 角度定义
SERVO_PORT_NAME = 'COM7' # 舵机串口号
SERVO_BAUDRATE = 115200 # 舵机的波特率
SERVO_ID = 0 # 舵机的ID号
# 初始化串口
uart = serial.Serial(port=SERVO_PORT_NAME, baudrate=SERVO_BAUDRATE,\
parity=serial.PARITY_NONE, stopbits=1,\
bytesize=8,timeout=0)
# 初始化舵机管理器
uservo = UartServoManager(uart)
print("测试常规模式")
# 设置舵机为轮转普通模式
# 旋转方向(is_cw) : 顺时针
# 角速度(mean_dps) : 单位°/s
uservo.set_wheel_norm(SERVO_ID, is_cw=True, mean_dps=200.0)
# 延时5s然后关闭
time.sleep(5.0)
# 停止
uservo.wheel_stop(SERVO_ID)
time.sleep(1)
# 定圈模式
print("测试定圈模式")
uservo.set_wheel_turn(SERVO_ID, turn=5, is_cw=False, mean_dps=200.0)
# 定时模式
print("测试定时模式")
uservo.set_wheel_time(SERVO_ID, interval=5000, is_cw=True, mean_dps=200.0)
10.用户自定义参数设置¶
注意事项: 如有修改用户自定义参数的需要,可以在上位机进行,更加方便,直观。
10.1.API-reset_user_data¶
重置参数, 恢复默认值。
函数原型
输入参数
servo_id: 舵机ID
输出参数
- 无
10.2.API-read_data¶
读取参数
函数原型
输入参数
servo_id: 舵机IDaddress: 内存表
输出参数
content: 数值的二进制数据流
10.3.API-write_data¶
写入参数
函数原型
输入参数
servo_id: 舵机IDaddress: 内存表content: 数值的二进制数据流
输出参数
- 无
10.4.例程源码-重置用户参数¶
example/reset_user_data
'''
伺服总线舵机
> 重置用户参数 <
注意事项: 这个指令比较特殊, 舵机ID也会被重置为0
因此测试该指令的时候, 最好只接一颗舵机。
--------------------------------------------------
* 作者: 深圳市华馨京科技有限公司
* 网站:https://fashionrobo.com/
* 更新时间: 2023/03/13
--------------------------------------------------
'''
# 添加uservo.py的系统路径
import sys
sys.path.append("../../src")
# 导入依赖
import time
import struct
import serial
from uservo import UartServoManager
# 参数配置
# 角度定义
SERVO_PORT_NAME = 'COM7' # 舵机串口号
SERVO_BAUDRATE = 115200 # 舵机的波特率
SERVO_ID = 0 # 舵机的ID号
# 数据表定义
ADDRESS_SOFTSTART = 49 # 上电缓启动地址位
SOFTSTART_OPEN = 1 # 上电缓启动-开启
SOFTSTART_CLOSE = 0 # 上电缓启动-关闭
# 初始化串口
uart = serial.Serial(port=SERVO_PORT_NAME, baudrate=SERVO_BAUDRATE,\
parity=serial.PARITY_NONE, stopbits=1,\
bytesize=8,timeout=0)
# 初始化舵机管理器
uservo = UartServoManager(uart, is_debug=True)
# 重置用户数据
uservo.reset_user_data(SERVO_ID)
# 舵机扫描
print("开始进行舵机扫描")
uservo.scan_servo()
servo_list = list(uservo.servos.keys())
print("舵机扫描结束, 舵机列表: {}".format(servo_list))
if SERVO_ID not in servo_list:
print("指定的SERVO_ID无效, 请修改舵机ID列表")
exit(-1)
print("重置舵机内存表: 舵机ID = {}".format(SERVO_ID))
uservo.reset_user_data(SERVO_ID)
print("重新进行舵机扫描")
uservo.scan_servo()
servo_list = list(uservo.servos.keys())
print("舵机扫描结束, 舵机列表: {}".format(servo_list))
10.5.例程源码-读取参数¶
example/read_data
'''
伺服总线舵机
> 参数读取 <
--------------------------------------------------
* 作者: 深圳市华馨京科技有限公司
* 网站:https://fashionrobo.com/
* 更新时间: 2023/03/13
--------------------------------------------------
'''
# 添加uservo.py的系统路径
import sys
sys.path.append("../../src")
# 导入依赖
import time
import struct
import serial
from uservo import UartServoManager
# 参数配置
# 角度定义
SERVO_PORT_NAME = 'COM7' # 舵机串口号
SERVO_BAUDRATE = 115200 # 舵机的波特率
SERVO_ID = 0 # 舵机的ID号
# 数据表定义
ADDRESS_VOLTAGE = 1 # 总线电压值的地址
# 初始化串口
uart = serial.Serial(port=SERVO_PORT_NAME, baudrate=SERVO_BAUDRATE,\
parity=serial.PARITY_NONE, stopbits=1,\
bytesize=8,timeout=0)
# 初始化舵机管理器
uservo = UartServoManager(uart)
# 内存表读取
# 注: 因为每个数据位数据格式各不相同
# 因此读取得到的是字节流
voltage_bytes = uservo.read_data(SERVO_ID, ADDRESS_VOLTAGE)
# 数据解析
# 电压的数据格式为uint16_t,单位: mV
# 关于struct的用法,请参阅官方手册: https://docs.python.org/3/library/struct.html
voltage = struct.unpack('<H', voltage_bytes)
print("总线电压 {} mV".format(voltage))
10.6.例程源码-写入参数¶
example/write_data
'''
伺服总线舵机
> 写入参数 <
--------------------------------------------------
* 作者: 深圳市华馨京科技有限公司
* 网站:https://fashionrobo.com/
* 更新时间: 2023/03/13
--------------------------------------------------
'''
# 添加uservo.py的系统路径
import sys
sys.path.append("../../src")
# 导入依赖
import time
import struct
import serial
from uservo import UartServoManager
# 参数配置
# 角度定义
SERVO_PORT_NAME = 'COM7' # 舵机串口号
SERVO_BAUDRATE = 115200 # 舵机的波特率
SERVO_ID = 0 # 舵机的ID号
# 数据表定义
ADDRESS_SOFTSTART = 49 # 上电缓启动地址位
SOFTSTART_OPEN = 1 # 上电缓启动-开启
SOFTSTART_CLOSE = 0 # 上电缓启动-关闭
# 初始化串口
uart = serial.Serial(port=SERVO_PORT_NAME, baudrate=SERVO_BAUDRATE,\
parity=serial.PARITY_NONE, stopbits=1,\
bytesize=8,timeout=0)
# 初始化舵机管理器
uservo = UartServoManager(uart)
# 内存表写入
# 注: 在写入之前,需要查阅手册确保该数据位可写
# 缓启动数据类型 uint8_t, 首先构造数据位
softstart_bytes = struct.pack('<B', SOFTSTART_OPEN)
# 将数据写入内存表
ret = uservo.write_data(SERVO_ID, ADDRESS_SOFTSTART, softstart_bytes)
# 打印日志
print("缓启动数据写入是否成功: {}".format(ret))
11.状态数据读取¶
11.1.API-query_voltage¶
查询当前的电压
函数原型
输入参数
servo_id: 舵机ID
输出参数
voltage: 电压,单位V
11.2.API-query_current¶
查询当前的电流
函数原型
输入参数
servo_id: 舵机ID
输出参数
power: 舵机电流,单位A
11.3.API-query_power¶
查询当前的功率
函数原型
输入参数
servo_id: 舵机ID
输出参数
power: 舵机功率,单位W
11.4.API-query_temperature¶
查询舵机当前的温度
函数原型
输入参数
servo_id: 舵机ID
输出参数
temperature: 温度,ADC值
11.5.API-query_status¶
查询舵机当前的工作状态
# 舵机工作状态标志位
# BIT[0] - 执行指令置1,执行完成后清零。
# BIT[1] - 执行指令错误置1,在下次正确执行后清零。
# BIT[2] - 堵转错误置1,解除堵转后清零。
# BIT[3] - 电压过高置1,电压恢复正常后清零。
# BIT[4] - 电压过低置1,电压恢复正常后清零。
# BIT[5] - 电流错误置1,电流恢复正常后清零。
# BIT[6] - 功率错误置1,功率恢复正常后清零。
# BIT[7] - 温度错误置1,温度恢复正常后清零。
函数原型
输入参数
servo_id: 舵机ID
输出参数
status: 8位工作状态标志位
11.6.例程源码¶
example/servo_status
'''
伺服总线舵机
> 读取舵机的状态信息 <
--------------------------------------------------
* 作者: 深圳市华馨京科技有限公司
* 网站:https://fashionrobo.com/
* 更新时间: 2023/03/13
--------------------------------------------------
'''
# 添加uservo.py的系统路径
import sys
import os
sys.path.append("../../src")
# sys.path.append(os.getcwd()+"\\src")
# 导入依赖
import time
import serial
from uservo import UartServoManager
# 参数配置
# 角度定义
SERVO_PORT_NAME = 'COM3' # 舵机串口号
SERVO_BAUDRATE = 115200 # 舵机的波特率
SERVO_ID = 0 # 舵机的ID号
# 初始化串口
uart = serial.Serial(port=SERVO_PORT_NAME, baudrate=SERVO_BAUDRATE,\
parity=serial.PARITY_NONE, stopbits=1,\
bytesize=8,timeout=0)
# 初始化舵机管理器
uservo = UartServoManager(uart)
def log_servo_status():
'''打印舵机状态'''
# 读取温度
voltage = uservo.query_voltage(SERVO_ID)
# 读取电流
current = uservo.query_current(SERVO_ID)
# 读取功率
power = uservo.query_power(SERVO_ID)
# 读取温度
temp = uservo.query_temperature(SERVO_ID)
# 舵机工作状态标志位
# BIT[0] - 执行指令置1,执行完成后清零。
# BIT[1] - 执行指令错误置1,在下次正确执行后清零。
# BIT[2] - 堵转错误置1,解除堵转后清零。
# BIT[3] - 电压过高置1,电压恢复正常后清零。
# BIT[4] - 电压过低置1,电压恢复正常后清零。
# BIT[5] - 电流错误置1,电流恢复正常后清零。
# BIT[6] - 功率错误置1,功率恢复正常后清零。
# BIT[7] - 温度错误置1,温度恢复正常后清零。
status = uservo.query_status(SERVO_ID)
print("Voltage: {:4.1f}V; Current: {:4.1f}A; Power: {:4.1f}W; T: {:2.0f}; Status: {:08b}".format(voltage, current, power, temp,status), end='\r')
while True:
uservo.set_servo_angle(SERVO_ID, 90)
while not uservo.is_stop():
log_servo_status()
time.sleep(0.1)
time.sleep(1)
uservo.set_servo_angle(SERVO_ID, -90)
while not uservo.is_stop():
log_servo_status()
time.sleep(0.1)
time.sleep(1)
12.舵机失锁¶
注意事项: 失锁状态下,舵机仍会响应指令。
12.1.API-disable_torque¶
函数原型
输入参数
servo_id: 舵机ID
输出参数
- 无
13.原点设置¶
注:仅适用于无刷磁编码舵机V311及之后的版本,该API用于设置原点,须在失锁状态下使用。
13.1.API-set_origin_point¶
函数原型
输入参数
servo_id: 舵机的ID
输出参数
- 无
13.2.例程源码¶
example/set_origin_point
'''
总线伺服舵机
> Python SDK设置舵机原点 Example <
--------------------------------------------------
* 作者: 深圳市华馨京科技有限公司
* 网站:https://fashionrobo.com/
* 更新时间: 2024/08/20
--------------------------------------------------
'''
# 添加uservo.py的系统路径
import os
import sys
sys.path.append(os.getcwd()+"\\src")
# sys.path.append("../../src")
# 导入依赖
import time
import serial
from uservo import UartServoManager
# 参数配置
# 角度定义
SERVO_PORT_NAME = 'COM3' # 舵机串口号
SERVO_BAUDRATE = 115200 # 舵机的波特率
SERVO_ID = 0 # 舵机的ID号
# 初始化串口
uart = serial.Serial(port=SERVO_PORT_NAME, baudrate=SERVO_BAUDRATE,\
parity=serial.PARITY_NONE, stopbits=1,\
bytesize=8,timeout=0)
# 初始化舵机管理器
uservo = UartServoManager(uart)
angle = uservo.query_servo_angle(SERVO_ID)
print("当前舵机角度: {:4.1f} °".format(angle), end='\n')
uservo.disable_torque(SERVO_ID)
uservo.set_origin_point(SERVO_ID)
time.sleep(1)
angle = uservo.query_servo_angle(SERVO_ID)
print("设置新的原点后舵机角度: {:4.1f} °".format(angle), end='\n')
14.同步指令¶
注:仅适用于无刷磁编码舵机V316及之后的版本
支持的指令编号
| 数据包编号 | 数据包命名 | 功能 |
|---|---|---|
| 8 | MoveOnAngleMode(Rotate) | 角度模式 |
| 11 | MoveOnAngleModeExByInterval | 角度模式(基于加减速时间) |
| 12 | MoveOnAngleModeExByVelocity | 角度模式(基于目标速度) |
| 13 | MoveOnMultiTurnAngleMode(Rotate) | 多圈角度控制 |
| 14 | MoveOnMultiTurnAngleModeExByInterval | 多圈角度控制(基于加减速时间) |
| 15 | MoveOnMultiTurnAngleModeExByVelocity | 多圈角度控制(基于目标速度) |
| 22 | ServoMonitor | 舵机数据监控 |
14.1.API-send_sync_angle¶
函数原型
输入参数
command_id: 指令编号servo_num: 舵机个数command_data_list: 指令数据列表
输出参数
- 无
14.2.API-send_sync_anglebyinterval¶
函数原型
输入参数
command_id: 指令编号servo_num: 舵机个数command_data_list: 指令数据列表
输出参数
- 无
14.3.API-send_sync_anglebyvelocity¶
函数原型
输入参数
command_id: 指令编号servo_num: 舵机个数command_data_list: 指令数据列表
输出参数
- 无
14.4.API-send_sync_multiturnangle¶
函数原型
输入参数
command_id: 指令编号servo_num: 舵机个数command_data_list: 指令数据列表
输出参数
- 无
14.5.API-send_sync_multiturnanglebyinterval¶
函数原型
输入参数
command_id: 指令编号servo_num: 舵机个数command_data_list: 指令数据列表
输出参数
-
无
14.6.API-send_sync_multiturnanglebyvelocity¶
函数原型
输入参数
command_id: 指令编号servo_num: 舵机个数command_data_list: 指令数据列表
输出参数
- 无
14.7.API-send_sync_servo_monitor¶
函数原型
输入参数
command_id: 指令编号servo_num: 舵机个数command_data_list: 指令数据列表
输出参数
- ID
- 电压
- 电流
- 功率
- 温度
- 状态
- 角度
- 圈数
14.8.例程源码¶
example/sync_mode
'''
总线伺服舵机
> Python SDK同步指令 Example <
--------------------------------------------------
* 作者: 深圳市华馨京科技有限公司
* 网站:https://fashionrobo.com/
* 更新时间: 2024/12/23
--------------------------------------------------
'''
# 添加uservo.py的系统路径
import sys
sys.path.append("../../src")
import time
import serial
import struct
# 导入串口舵机管理器
from uservo import UartServoManager
# 设置日志输出模式为INFO
USERVO_PORT_NAME = 'COM3'
uart = serial.Serial(port=USERVO_PORT_NAME, baudrate=115200,\
parity=serial.PARITY_NONE, stopbits=1,\
bytesize=8,timeout=0)
srv_num = 6# 舵机个数
uservo = UartServoManager(uart, is_debug=True)
command_data_list1 = [
struct.pack('<BhHH', 1, -400, 500, 10000), # 同步指令角度模式控制
struct.pack('<BhHH', 2, -400 ,500, 10000), #id2+度数-40 +时间 +功率
]
uservo.send_sync_angle(8, 2, command_data_list1)
time.sleep(2.02)
command_data_list2 = [
struct.pack('<BhHHHH', 1, 400, 500, 100, 100, 10000) , # 同步指令角度模式控制(基於加减速時間)
struct.pack('<BhHHHH', 2, 400, 500, 100, 100, 10000) , #id2+度数40+总时间+启动加速时间+运动减速时间+功率
]
uservo.send_sync_anglebyinterval(11, 2, command_data_list2)
time.sleep(2.02)
command_data_list4 = [
struct.pack('<BhHHHH', 1, 600, 500, 100, 100, 10000), # 同步指令角度模式控制 (基於速率的運動控制 )
struct.pack('<BhHHHH', 2, 600, 500, 100, 100, 10000), # id2+度数60+时间+功率
]
uservo.send_sync_anglebyvelocity(12, 2, command_data_list4)
time.sleep(2.02)
command_data_list3 = [
struct.pack('<BlLH', 1, 800, 1500, 10000) ,# 同步指令多圈角度模式控制
struct.pack('<BlLH', 2, 800 ,1500, 10000) ,# id2+度数80 +时间 +功率
]
uservo.send_sync_multiturnangle(13, 2, command_data_list3)
time.sleep(2.02)
command_data_list5 = [
struct.pack('<BlLHHH', 1, 10010, 1000, 100,100,10000) ,# 多圈角度模式控制 (基於加減速時段的運動控制 )
struct.pack('<BlLHHH', 2, 10010 ,1000,100,100, 10000) ,# id2+度数1001+总时间+启动加速时间+运动减速时间+功率
]
uservo.send_sync_multiturnanglebyinterval(14, 2, command_data_list5)
time.sleep(2.02)
command_data_list6 = [
struct.pack('<BlHHHH', 1, 12010, 3000,100 ,100,10000) ,# 多圈角度模式控制(基於速率的運動控制)
struct.pack('<BlHHHH', 2, 12010 ,3000, 100, 100, 10000) ,# id2+度数1201+目标速度300dps+启动加速时间+运动减速时间+功率
]
uservo.send_sync_multiturnanglebyvelocity(15, 2, command_data_list6)
example/sync_monitor
'''
总线伺服舵机
> Python SDK同步指令-同步监控 Example <
--------------------------------------------------
* 作者: 深圳市华馨京科技有限公司
* 网站:https://fashionrobo.com/
* 更新时间: 2024/12/23
--------------------------------------------------
'''
# 添加uservo.py的系统路径
import sys
sys.path.append("../../src")
# 导入依赖
import time
import serial
from uservo import UartServoManager
# 参数配置
# 角度定义
SERVO_PORT_NAME = 'COM4' # 舵机串口号
SERVO_BAUDRATE = 115200 # 舵机的波特率
SERVO_ID = 0 # 舵机的ID号
# 初始化串口
uart = serial.Serial(port=SERVO_PORT_NAME, baudrate=SERVO_BAUDRATE,\
parity=serial.PARITY_NONE, stopbits=1,\
bytesize=8,timeout=0)
# 初始化舵机管理器
uservo = UartServoManager(uart)
power = 500 # 阻尼模式下的功率, 单位mW
uservo.set_damping(SERVO_ID, power)
servo_ids = [5,6,2,76,17] # 想要同步读取的舵机ID列表
servo_monitor_data = uservo.send_sync_servo_monitor(servo_ids)
for servo_id, info in servo_monitor_data.items():
if info:
print("舵机ID: {}, 电压: {:.2f} V, 电流: {:.2f} A, 功率: {:.2f} W, 温度: {:.2f} °C, 状态: {}, 角度: {:.2f} °, 圈数: {:.0f}"
.format(servo_id, info.voltage / 1000, info.current / 1000, info.power / 1000, info.temp, info.status, info.angle, info.turn))
15.异步指令¶
注:仅适用于无刷磁编码舵机V316及之后的版本
API-begin_async¶
异步写入指令,对下一个接收到的指令进行缓存,仅支持角度指令。
函数原型
输入参数
- 无
输出参数
- 无
API-end_async¶
异步执行指令,立即执行缓存指令。若参数 cancel 不为0,则清除缓存。
函数原型
输入参数
cancel:是否取消
输出参数
- 无
例程源码¶
example/async_mode
'''
总线伺服舵机
> Python SDK异步指令 Example <
--------------------------------------------------
* 作者: 深圳市华馨京科技有限公司
* 网站:https://fashionrobo.com/
* 更新时间: 2024/12/23
--------------------------------------------------
'''
# 添加uservo.py的系统路径
import sys
sys.path.append("../../src")
# 导入依赖
import time
import struct
import serial
from uservo import UartServoManager
# 参数配置
# 角度定义
SERVO_PORT_NAME = 'COM6' # 舵机串口号 请根据实际串口进行修改
SERVO_BAUDRATE = 115200 # 舵机的波特率 请根据实际波特率进行修改
SERVO_ID = 0 #舵机ID
# 初始化串口
uart = serial.Serial(port=SERVO_PORT_NAME, baudrate=SERVO_BAUDRATE,\
parity=serial.PARITY_NONE, stopbits=1,\
bytesize=8,timeout=0)
# 初始化舵机管理器
uservo = UartServoManager(uart, is_debug=True)
uservo.begin_async() # 异步写入指令
time.sleep(0.02)
SERVO_ID = 0
uservo.set_servo_angle( 0, angle = 20.0, interval=0, power=10000)
time.sleep(2.02)
uservo.end_async(0) # 异步执行指令 0:执行; 1:取消
16.数据监控¶
注:仅适用于无刷磁编码舵机V316及之后的版本
API-query_servo_monitor¶
批量读取工作状态数据
函数原型
输入参数
servo_id:舵机ID
输出参数
voltage:舵机电压current:舵机电流voltage:舵机功率temp:舵机温度status:舵机状态angle:舵机角度(单圈/多圈)turn:圈数
例程源码¶
example/servo_monitor
'''
总线伺服舵机
> Python SDK批量读取工作状态数据 Example <
--------------------------------------------------
* 作者: 深圳市华馨京科技有限公司
* 网站:https://fashionrobo.com/
* 更新时间: 2024/12/23
--------------------------------------------------
'''
# 添加uservo.py的系统路径
import sys
sys.path.append("../../src")
# 导入依赖
import time
import struct
import serial
from uservo import UartServoManager
# 参数配置
SERVO_PORT_NAME = 'COM5' # 舵机串口号 请根据实际串口进行修改
SERVO_BAUDRATE = 115200 # 舵机的波特率 请根据实际波特率进行修改
servo_id = 0 # 监控的舵机id号
# 初始化串口
uart = serial.Serial(port=SERVO_PORT_NAME, baudrate=SERVO_BAUDRATE,\
parity=serial.PARITY_NONE, stopbits=1,\
bytesize=8,timeout=0)
# 初始化舵机管理器
uservo = UartServoManager(uart, is_debug=True)
servo_info = uservo.query_servo_monitor(servo_id=0)
print("舵机 电压: {:.2f} V".format( servo_info["voltage"]/1000)) #单个参数
print("舵机 角度: {:.2f} °".format( servo_info["angle"] ))
print("舵机电压: {:.2f}V, 电流: {:.2f}A, 功率: {:.2f}W, 温度: {:.2f}°C, 状态: {}, 角度: {:.2f}°, 圈数: {:.0f}"
.format( servo_info["voltage"] / 1000, servo_info["current"] / 1000, servo_info["power"] / 1000, servo_info["temp"], servo_info["status"], servo_info["angle"], servo_info["turn"])) #多个参数
17.停止指令¶
注:仅适用于无刷磁编码舵机V316及之后的版本
API-stop_on_control_mode¶
使舵机停止后保持不同状态模式。
函数原型
输入参数
servo_id:舵机IDmethod:停止后的模式:0x10 卸力 ;0x11保持锁力;0x12进入阻尼状态power:保持的功率
输出参数
- 无
例程源码¶
example/stop_on_control_mode
'''
总线伺服舵机
> MicroPython SDK停止指令 Example <
--------------------------------------------------
* 作者: 深圳市华馨京科技有限公司
* 网站:https://fashionrobo.com/
* 更新时间: 2024/12/23
--------------------------------------------------
'''
import ustruct
from machine import UART
from uservo import UartServoManager
import time
# 舵机ID编号: [0, 1, 2, ..., srv_num-1]
# 扫描舵机个数
servo_num = 4
# 舵机ID
servo_id = 0
# 舵机是否有多圈模式的功能
#servo_has_mturn_func = False
# 创建串口对象 使用串口2作为控制对象
# 波特率: 115200
# RX: gpio 16
# TX: gpio 17
uart = UART(2, baudrate=115200)
# 创建舵机管理器
uservo = UartServoManager(uart, srv_num=servo_num)
uservo.stop_on_control_mode(servo_id, method=0x10, power=500)
uservo.stop_on_control_mode(servo_id, method=0x11, power=500)
uservo.stop_on_control_mode(servo_id, method=0x12, power=500)
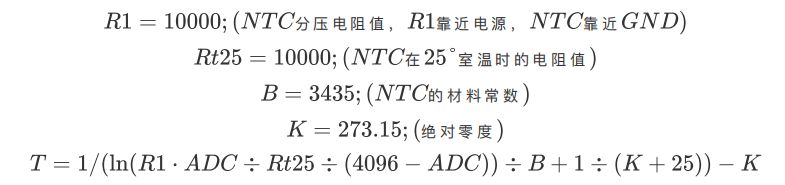
附表1 - 温度ADC值转换表¶
*注:ADC转换为摄氏度值公式*
| 温度(℃) | ADC | 温度(℃) | ADC | 温度(℃) | ADC |
|---|---|---|---|---|---|
| 50 | 1191 | 60 | 941 | 70 | 741 |
| 51 | 1164 | 61 | 918 | 71 | 723 |
| 52 | 1137 | 62 | 897 | 72 | 706 |
| 53 | 1110 | 63 | 876 | 73 | 689 |
| 54 | 1085 | 64 | 855 | 74 | 673 |
| 55 | 1059 | 65 | 835 | 75 | 657 |
| 56 | 1034 | 66 | 815 | 76 | 642 |
| 57 | 1010 | 67 | 796 | 77 | 627 |
| 58 | 986 | 68 | 777 | 78 | 612 |
| 59 | 963 | 69 | 759 | 79 | 598 |
- 以上为50-79℃ 温度/ADC参照表