总线伺服舵机上位机使用手册¶
1. 软件简介¶
本软件为总线伺服舵机上位机调试工具,用于ID配置、参数设置、实时运动控制等功能,适用于开发、调试及教学演示场景。
2. 下载与运行¶
3. 舵机连接与识别¶
3.1 物理接线说明¶
连接顺序如下:
- 将舵机接入转接板(任一接口均可);
- 接通外部电源(电压范围参考舵机规格);
- 使用 USB 线连接转接板与电脑。

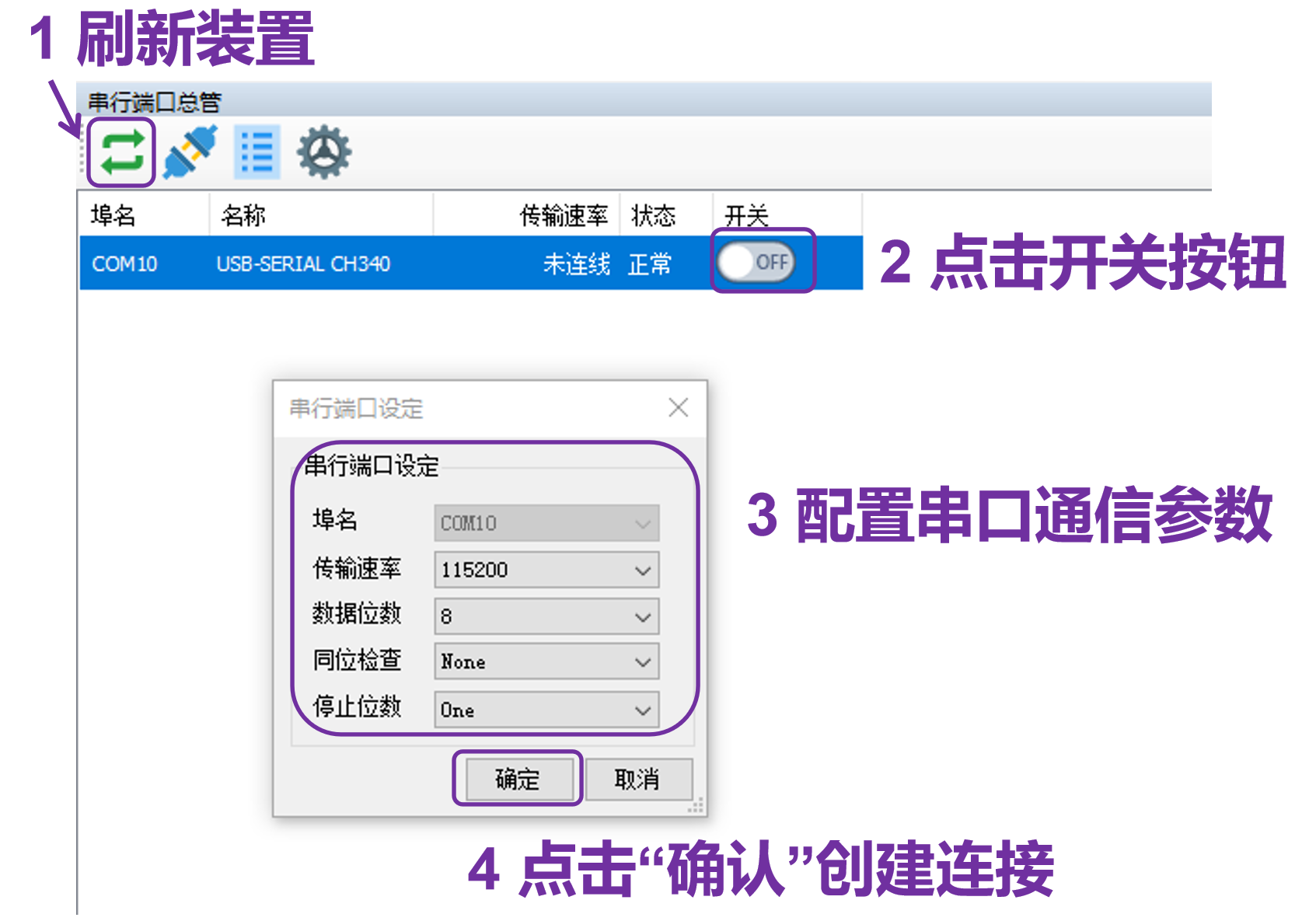
3.2 串口连接¶
- 打开上位机后,点击左上角 刷新装置 按钮刷新串口列表;
- 选择列表中自动识别的转接板串口(如 COM10);
- 点击开关按钮,配置串口通信参数
- 点击确认创建连接。
Caution
若串口未显示,可能为驱动问题,请安装 CH340 驱动。
点击下载 CH340 驱动
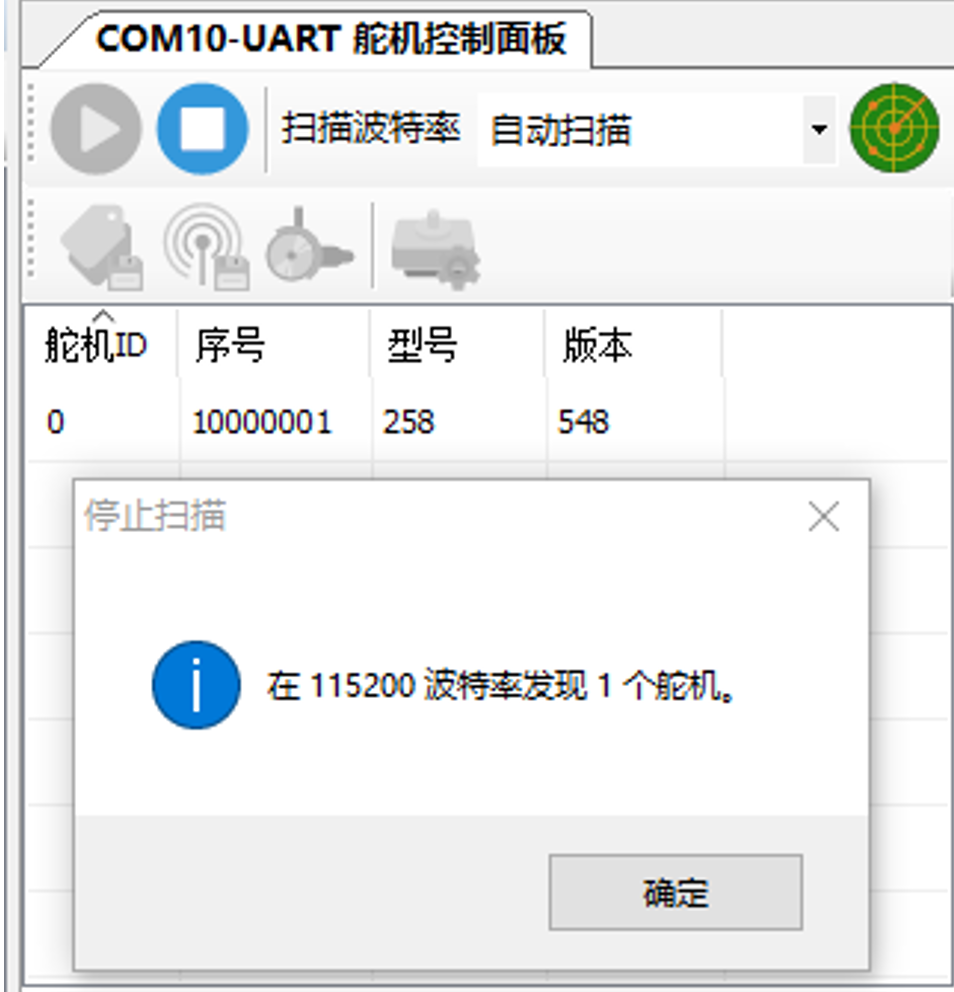
3.3 舵机扫描¶
- 可手动设置波特率或选择自动扫描,扫描前上位机会提醒舵机接线是否接妥和不要将相同ID的舵机串接在一起;
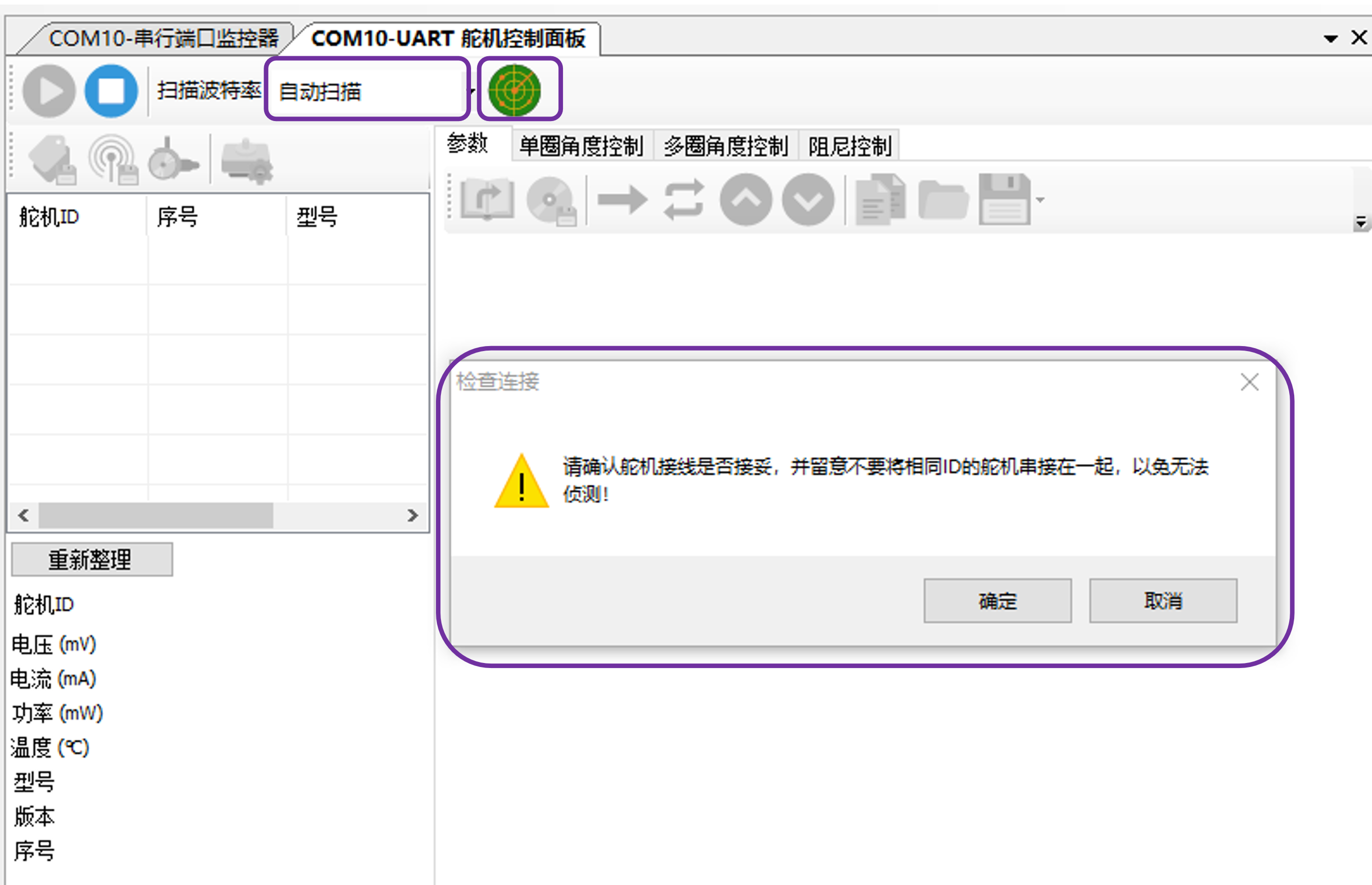
- 扫描完成后显示识别到的舵机数量;
Note
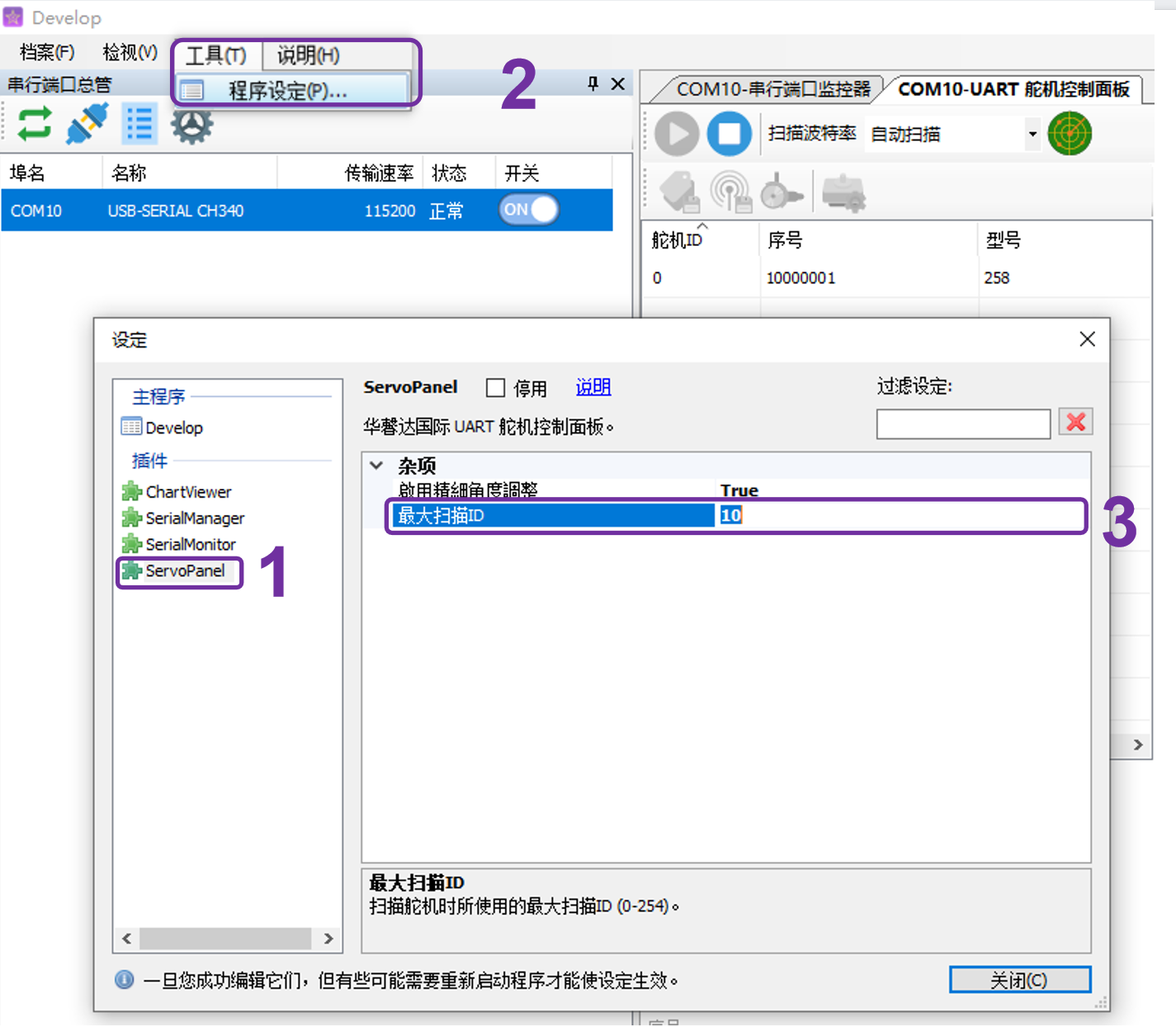
若需提升扫描速度,可在「工具 > 程序设定 > ServoPanelInternal>最大扫描编号」中设置最大扫描编号(默认 254,可适当降低)。
常见故障排查:¶
| 问题 | 可能原因 |
|---|---|
| 扫描不到舵机 | 电源未接通、电压不足、电池电量低 |
| 上位机卡死、无响应 | 多个舵机 ID 重复,建议逐个连接并设置唯一 ID |
4. 舵机基础操作¶
4.1 修改舵机 ID¶
- 在舵机列表中选中目标舵机;
- 点击写入ID图标;
- 输入新的 ID编号, 点击确认,ID 会实时更新。

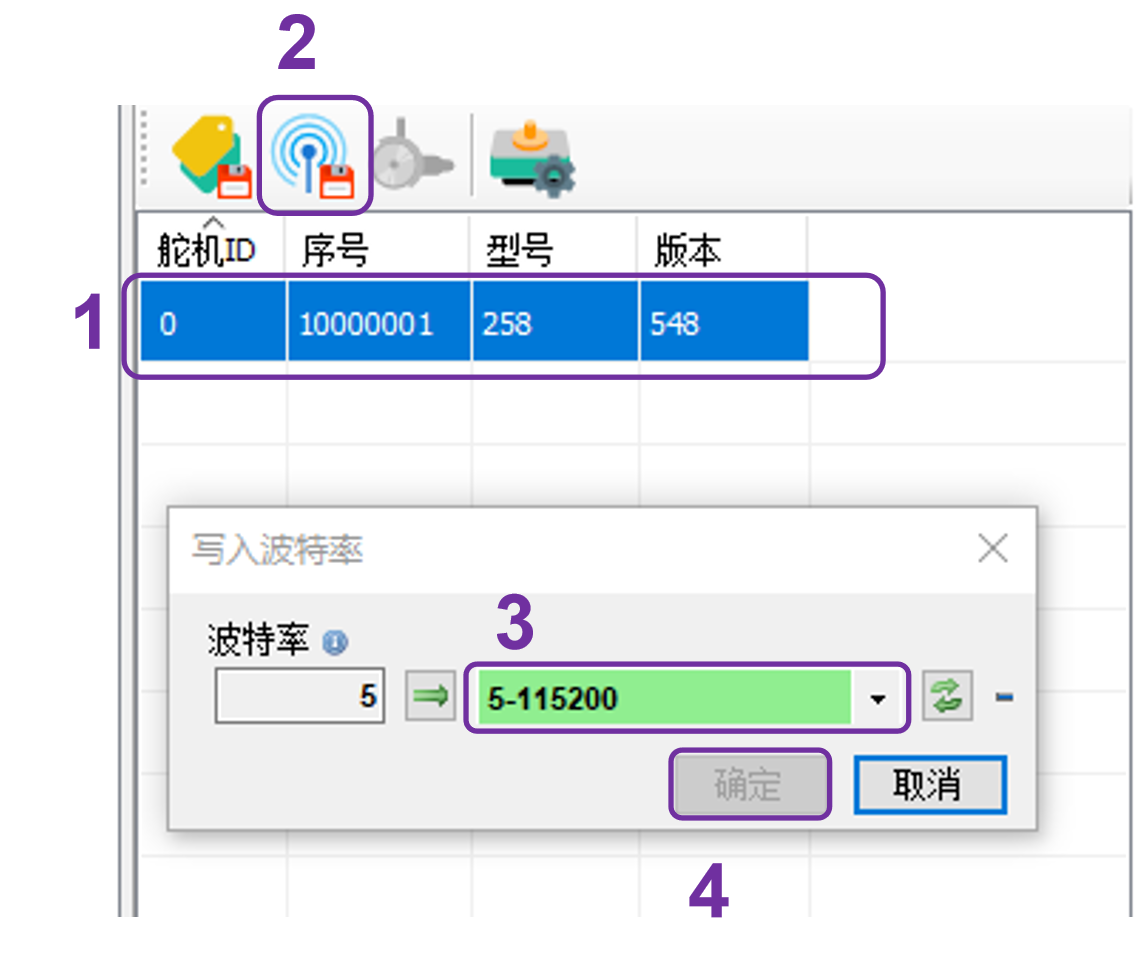
4.2 修改波特率¶
-
选中舵机后,点击写入波特率图标;
-
选择新波特率,点击确认;
-
舵机会立即应用新的通讯速率。
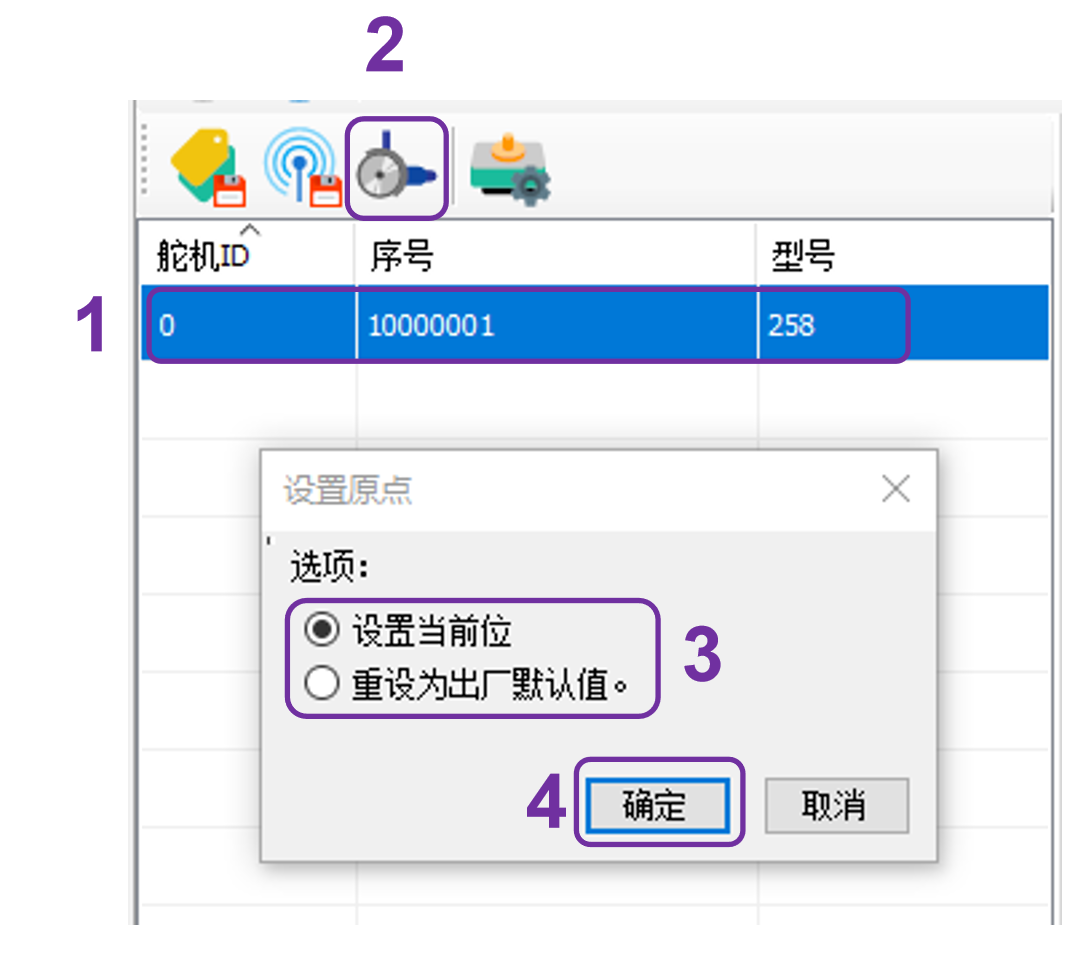
4.3 设定原点¶
-
选中目标舵机,点击设置原点图标;
-
可选择设置当前位置为原点,或重设为出厂默认值;
-
重新扫描舵机,原点设置成功。
Caution
仅磁编码系列支持此功能(机身型号带 -M 标识)
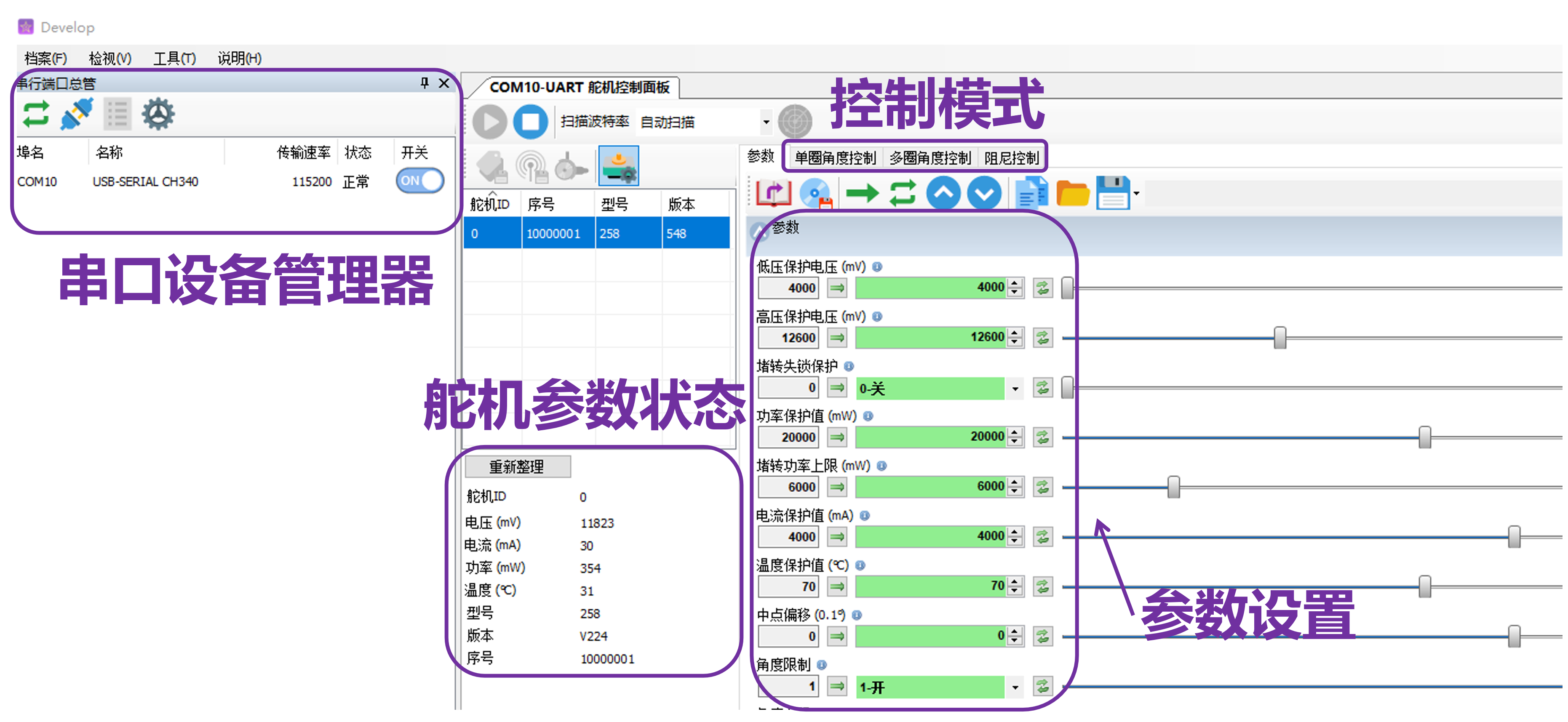
5. 参数调节¶
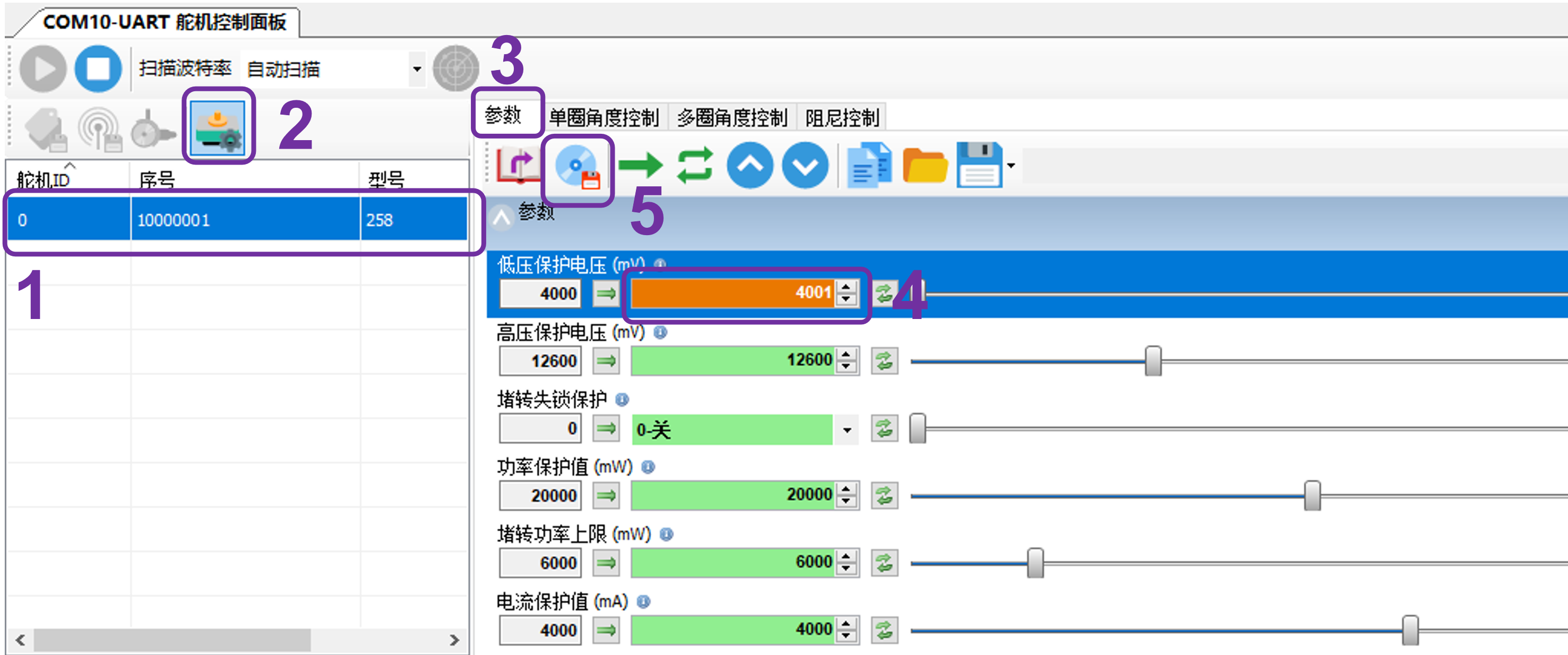
5.1 参数修改流程¶
-
切换至【参数】窗口,左侧显示当前参数,右侧为修改区;
-
在舵机列表中选中目标舵机;
-
可通过下拉框或滑动条调整数值;
-
参数变更后显示为橙色,点击写入参数后变为绿色,表示写入成功。
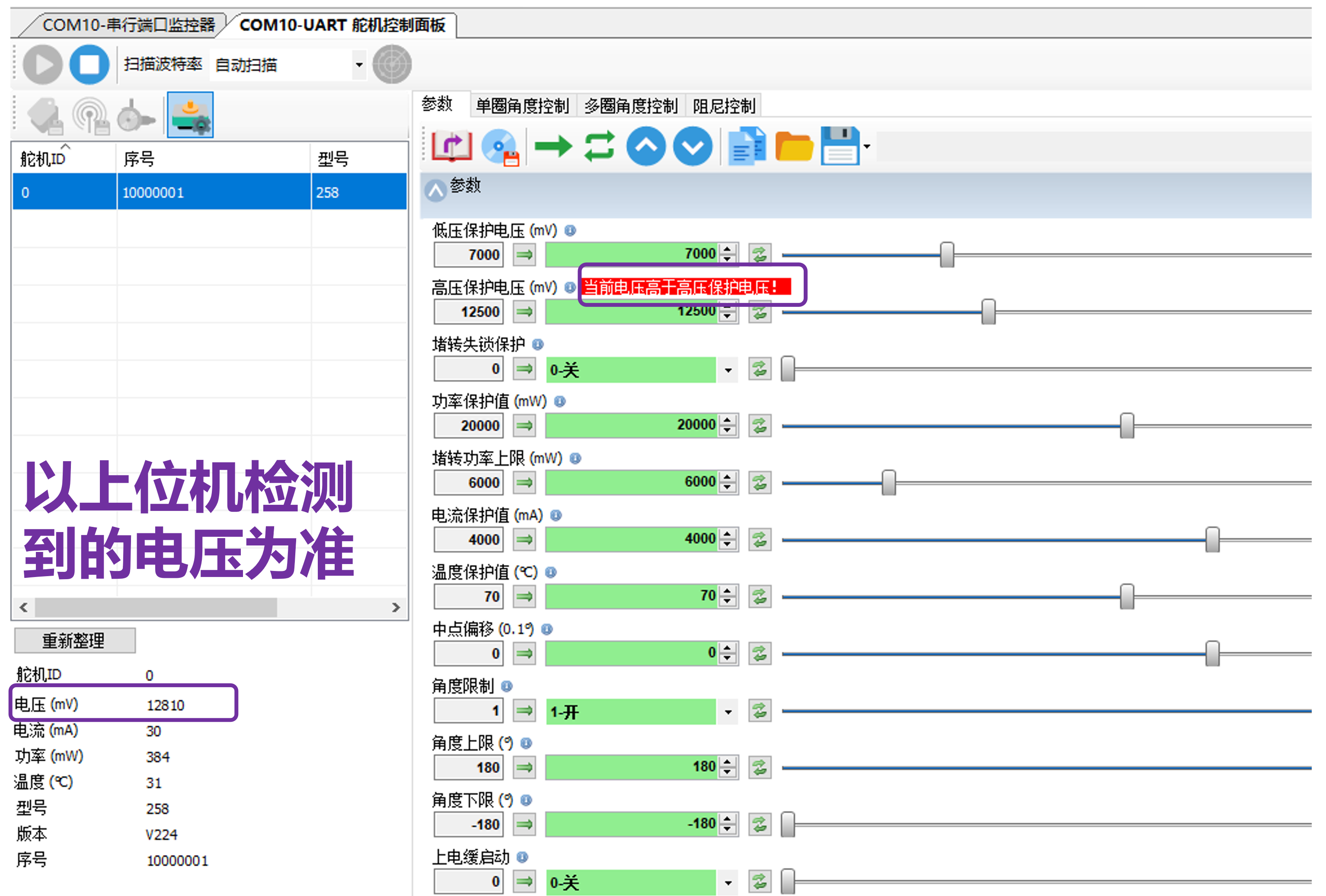
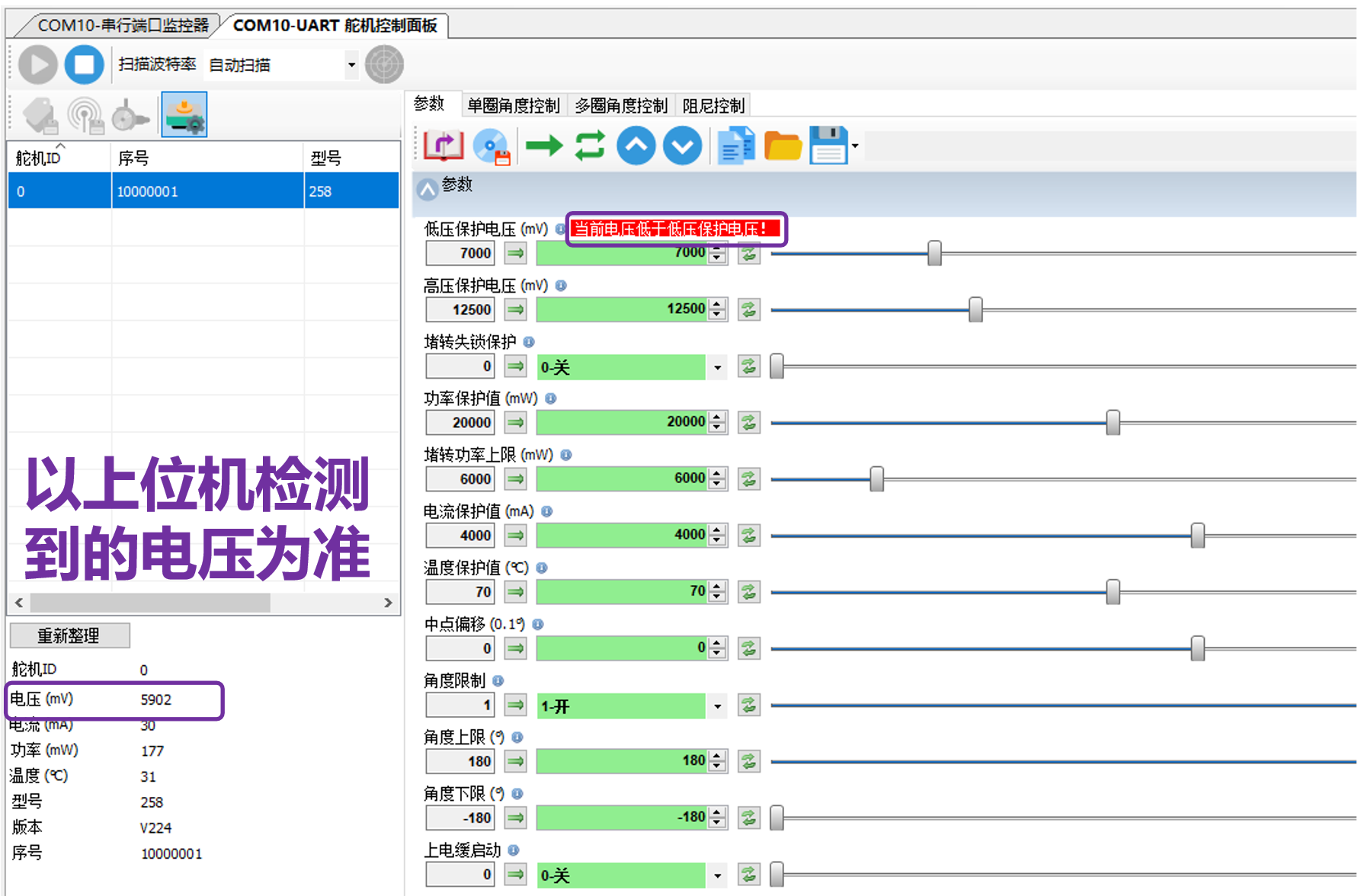
5.2 基本参数说明¶
| 参数名称 | 描述 |
|---|---|
| 高/低压保护 | 电压保护被触发时,伺服舵机会自动释放锁力; 必须要再次上电,且工作电压在正常范围内,才能使伺服舵机恢复工作; 重新扫描,舵机不再报警。 |
| 堵转保护 | 功率超过阈值时释放锁力 |
| 功率保护 | 此时堵转保护为关闭,功率超过阈值时以堵转功率上限值运行 |
| 指令响应 | 默认否,发送指令后不回包 ;开启后,发送指令后回包; 注意:当舵机工作模式发生切换时,系统会强制返回一条响应包。 |
5.3 内部参数说明¶
| 参数名称 | 描述 |
|---|---|
| 舵机方向 | 默认正转为顺时针,反转为逆时针(俯视) |
| PID调整 | 参数调整方法请参考PID 调节说明 |
6. 实时运动控制¶
6.1 单圈角度控制¶
- 设置目标角度(默认范围 -180° ~ +180°);
- 可依时间间隔或速率来设定运动参数,其中加减速的最小值不小于20ms
- 功率值默认为0(最大功率),可以根据需要调整;
- 启用“实时控制”后,可通过滑块动态调整角度;
- 停止状态支持三种模式:释放锁力,保持锁力,阻尼状态;选择对应模式,修改功率,点击停止送出指令
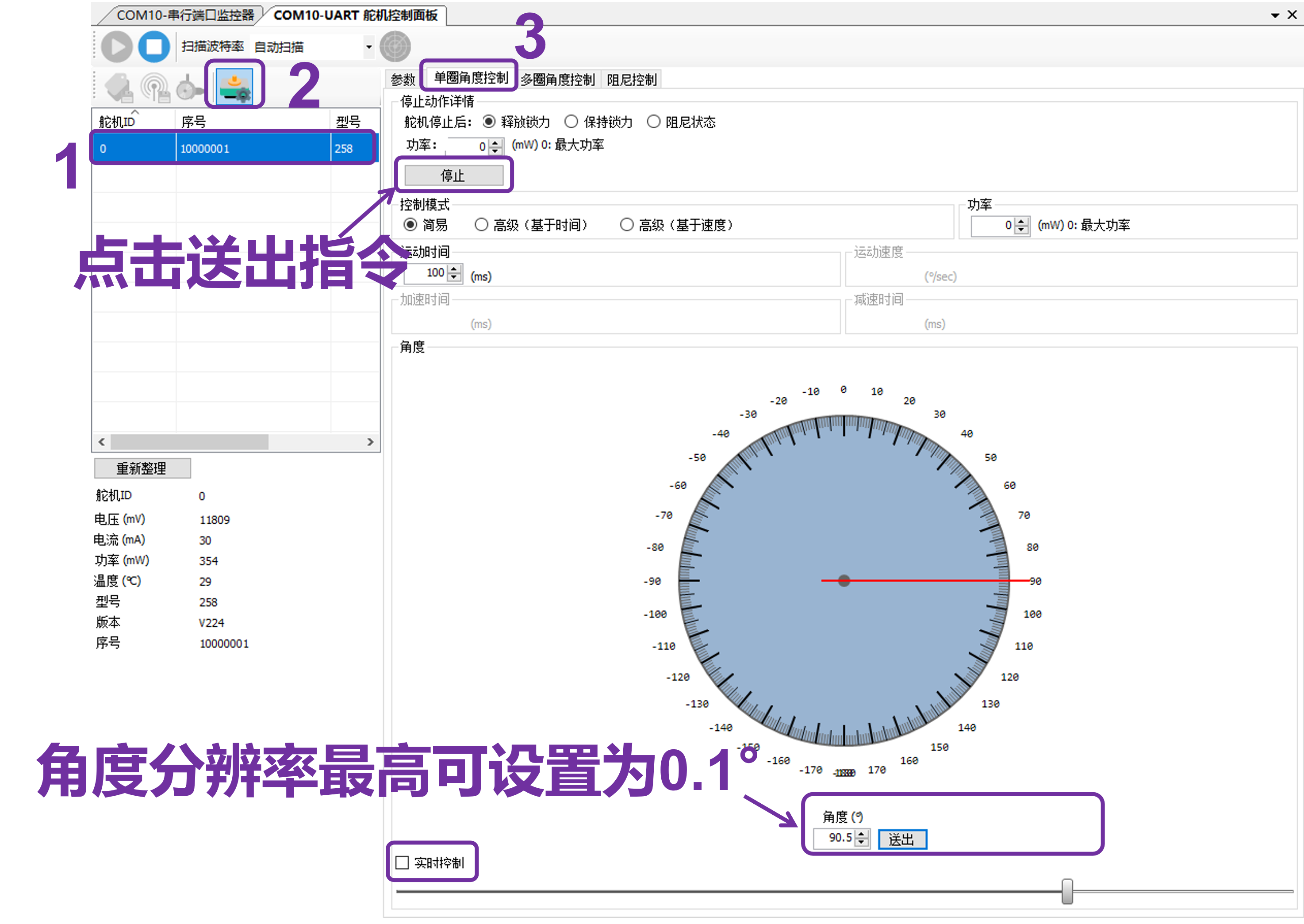
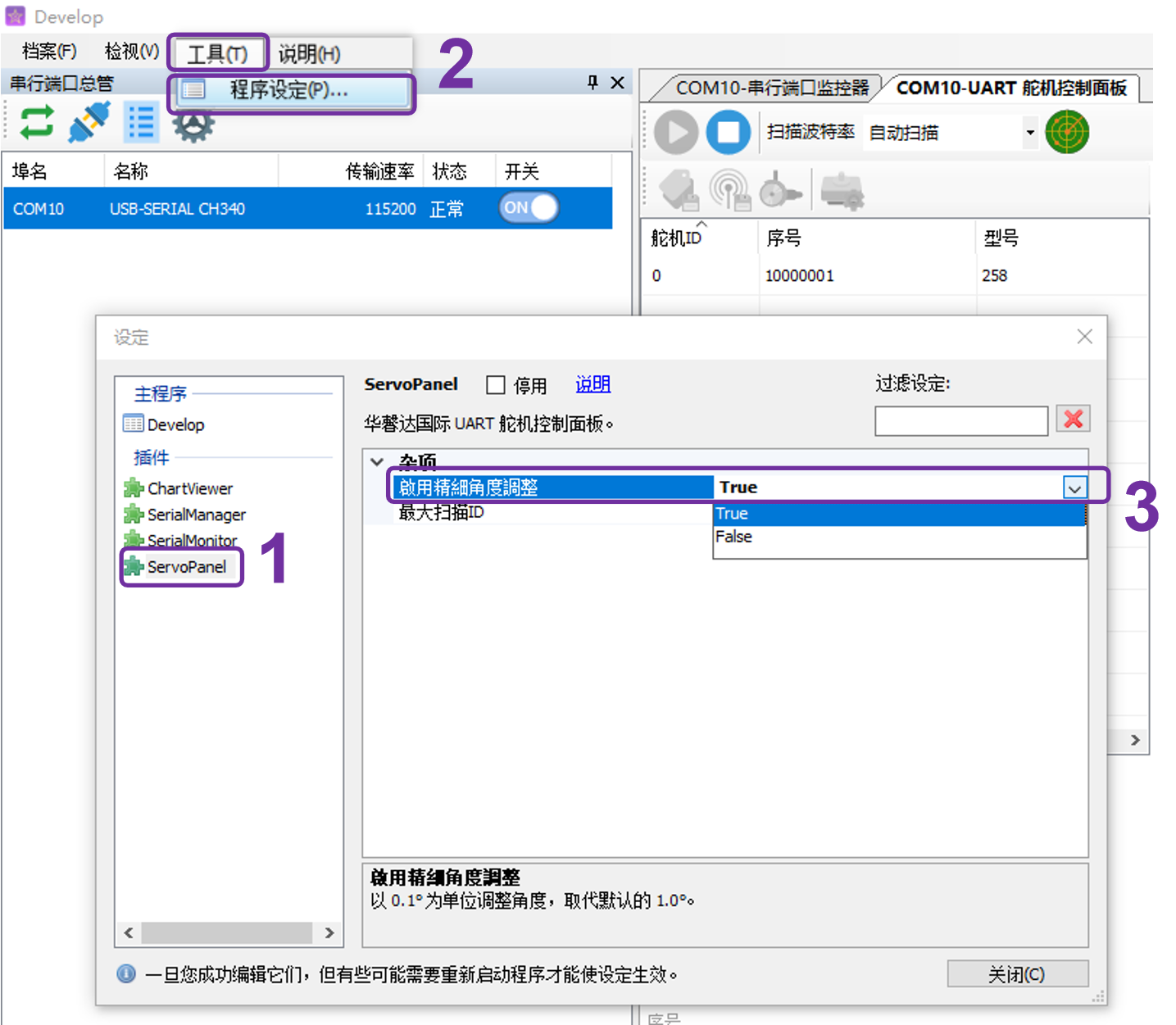
Note
舵机默认分辨率为1°,可在「工具 > 程序设定 > ServoPanelInternal>启用精细角度调整」,将选项改为True,再重新运行上位机即可
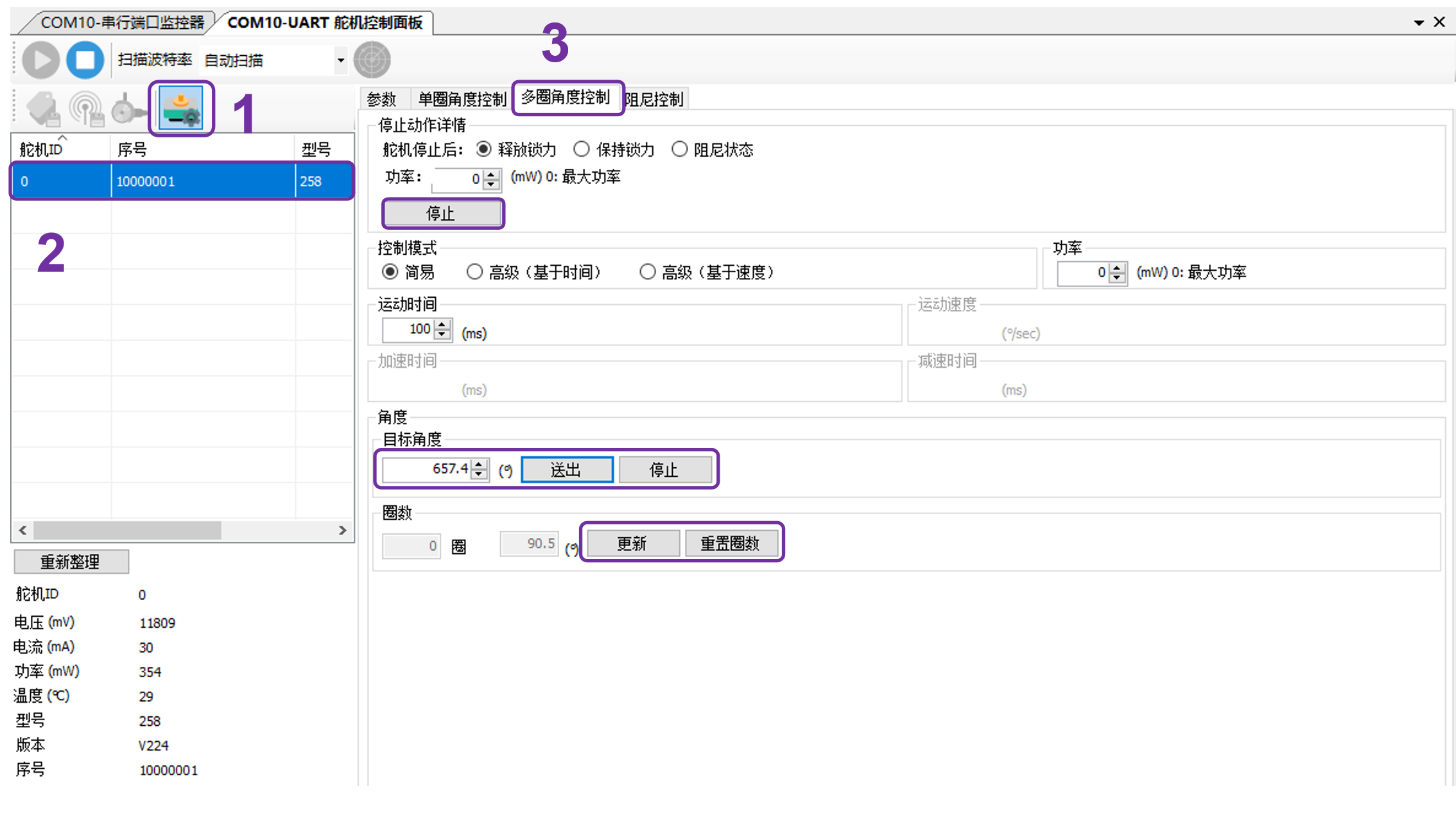
6.2 多圈角度控制¶
- 控制范围支持高达 ±1024 圈(约368,640°);
- 圈数更新,可查看当前累计旋转圈数;
- 重置圈数可以将当前的圈数清零(原点不变)
- 控制方法与单圈模式一致。
Caution
仅支持带磁编码功能的伺服舵机
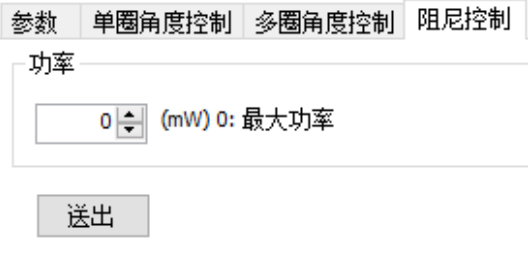
6.3 阻尼控制¶
- 可设置功率值调整阻尼强度。可以修改参数为500,在旋转舵机时可以感受到阻力增大。
7. 串口监视器¶
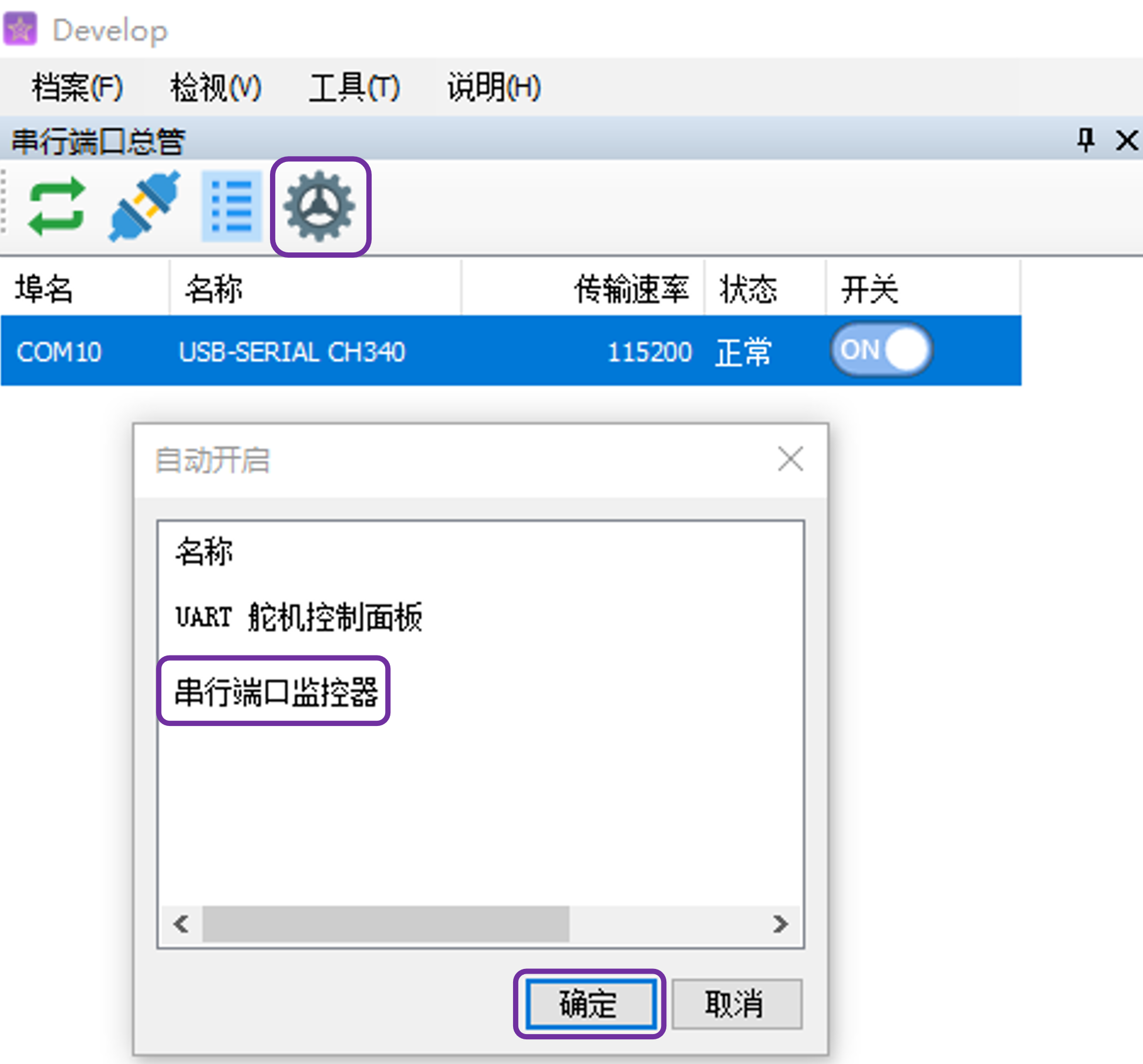
7.1 开启监视器¶
- 点击齿轮图标,启用自动开启串行端口监视器功能,再重新运行上位机即可;
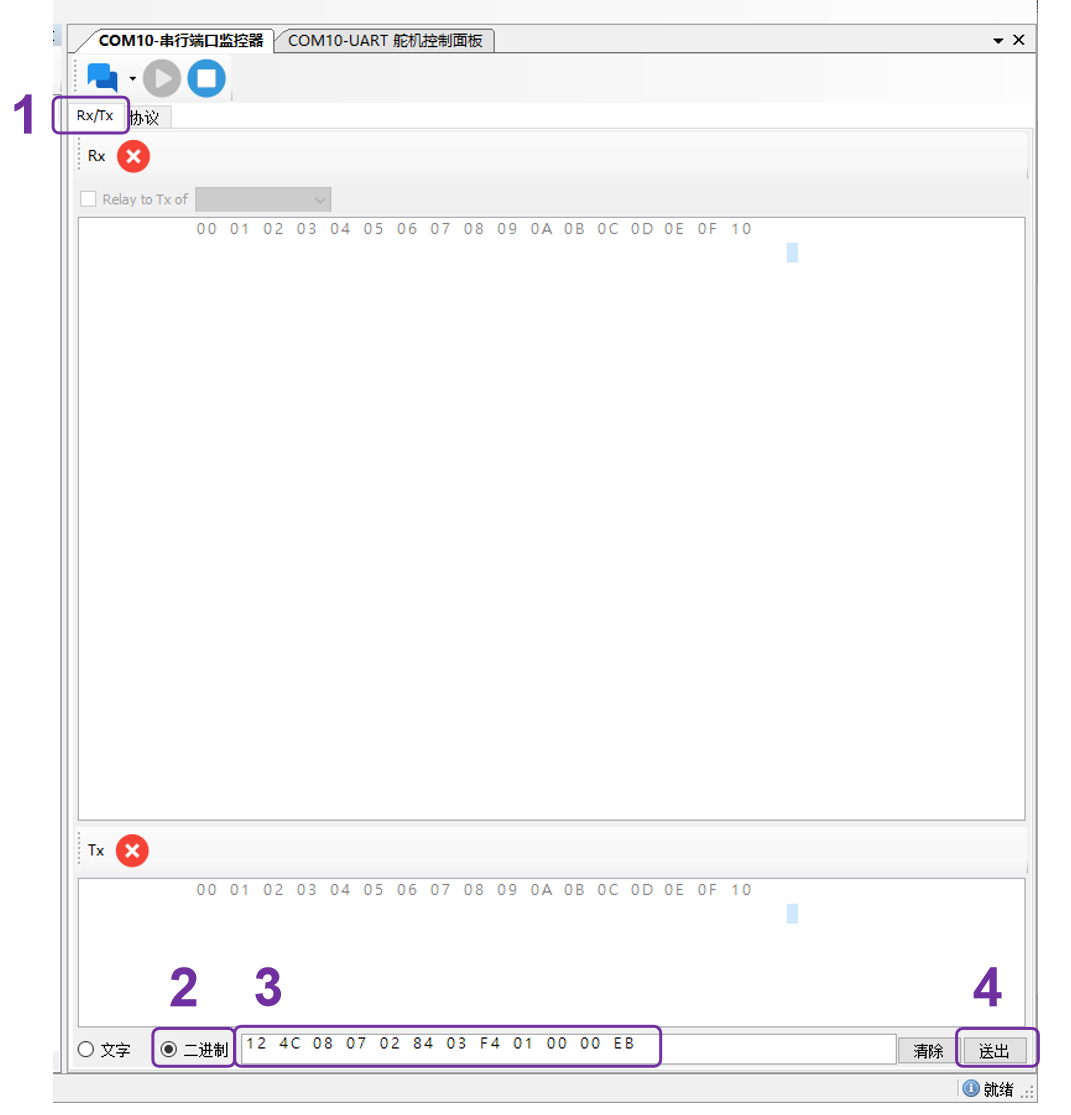
7.2 数据发送示例¶
例如:发送单圈控制指令使2号舵机从当前角度(0°)旋转至 90°,串口监视器中可发送数据包内容:
数据含义及指令协议请参考《总线伺服舵机通信协议》手册。
7.3 数据监视示例¶
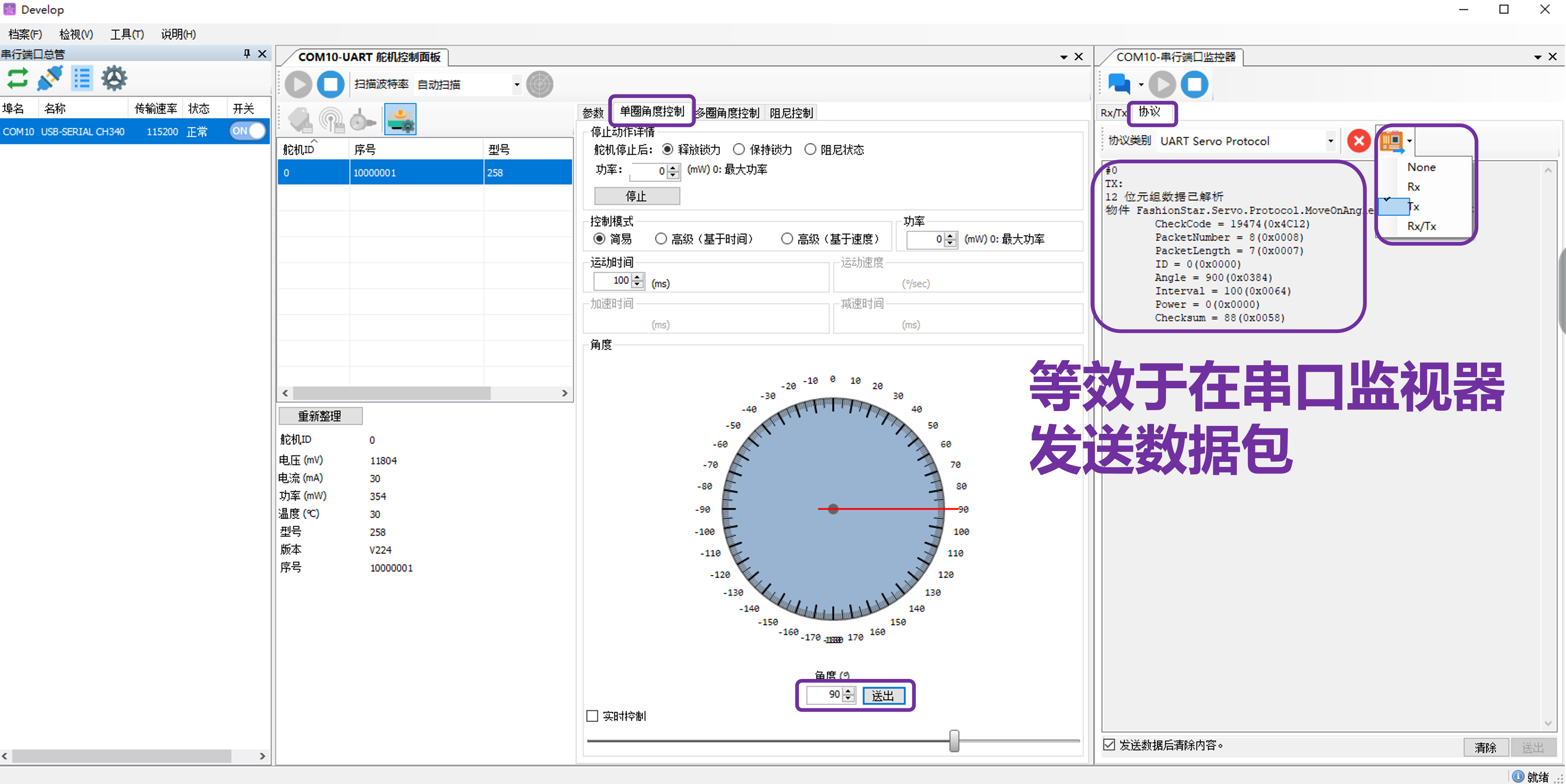
例如:舵机控制面板下向0号舵机发送单圈指令从当前角度(0°)旋转至 90°,等效于在串口监视器中发送数据包
8. 附录与常见问题¶
8.1 常见问题汇总¶
| 问题 | 建议处理方式 |
|---|---|
| 无法识别串口 | 检查驱动(CH340)是否安装;更换 USB 接口或线缆 |
| 舵机无响应 | 检查电源、电压及串口连接 |
| 上位机崩溃或卡顿 | 确认舵机 ID 是否唯一 |