总线伺服舵机SDK使用手册(Arduino ESP32)¶
1. 硬件准备工作¶
1.1. ESP32的串口资源¶
· ESP32一共有三组UART资源
| 功能 | GPIO |
|---|---|
| UART0 Tx | GPIO 1 |
| UART0 Rx | GPIO 3 |
| UART1 Tx | GPIO 10 |
| UART1 Rx | GPIO 9 |
| UART2 Tx | GPIO 17 |
| UART2 Rx | GPIO 16 |
· 我们使用ESP32的UART2作为总线伺服舵机的控制串口
1.2. ESP32与总线伺服舵机转接板的接线¶
| ESP32 | 总线伺服舵机转接板 | 备注 |
|---|---|---|
| GPIO 16(UART2 Rx) | Tx | |
| GPIO 17(UART2 Tx) | Rx | |
| VIN / 5V | 5V | 可选 |
| GND | GND |
注意事项:
· 使用时总线伺服舵机转接板需要外接电源
· 开发的时候,如果ESP32与电脑相连,则5V的接线可以不接
NodeMCU32s管脚图
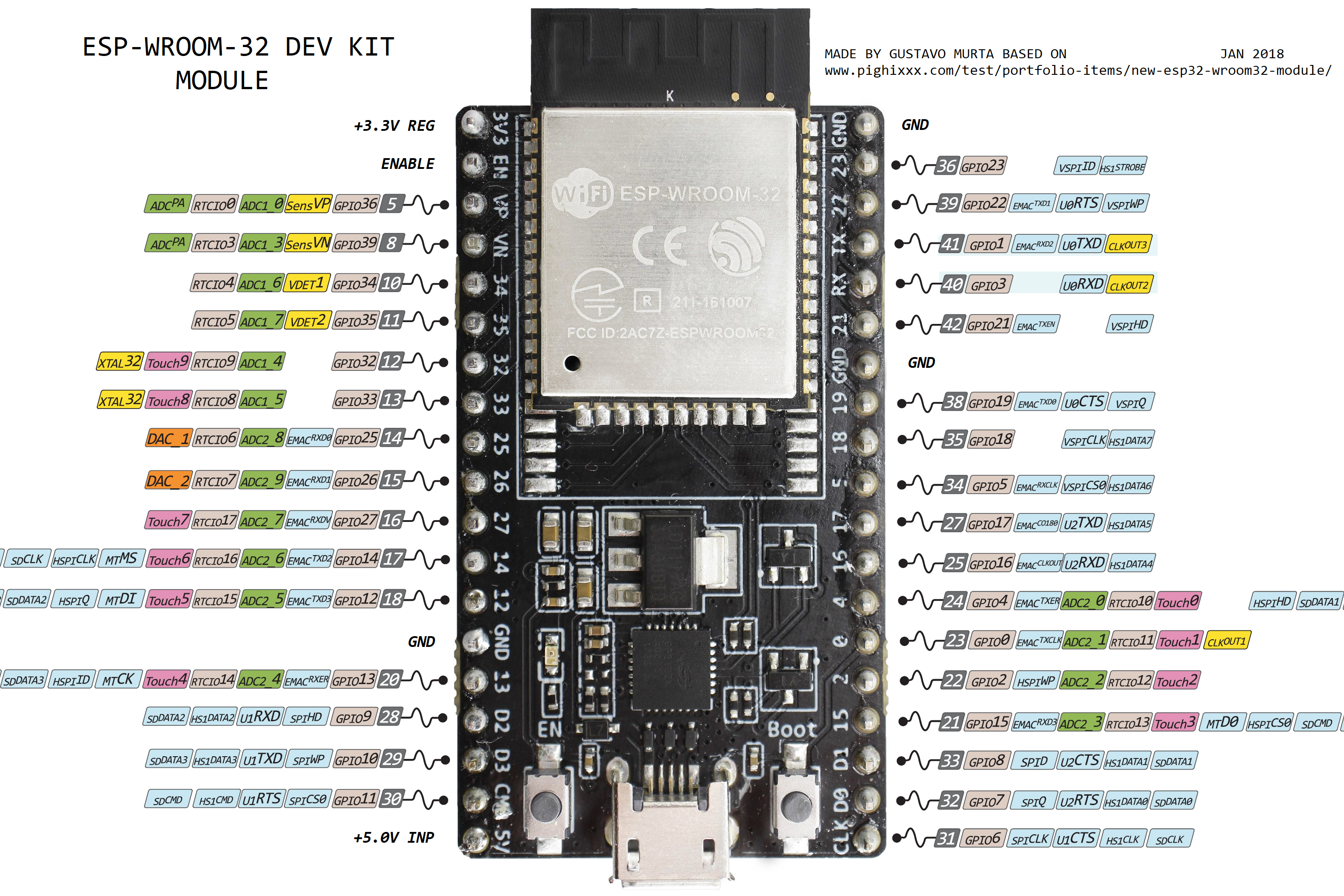
| 功能 | GPIO | 板载标记 |
|---|---|---|
| UART0 Tx | GPIO 1 | Tx |
| UART0 Rx | GPIO 3 | Rx |
| UART1 Tx | GPIO 10 | D3 |
| UART1 Rx | GPIO 9 | D2 |
| UART2 Tx | GPIO 17 | 17 |
| UART2 Rx | GPIO 16 | 16 |
NodeMCU32s硬件资源详细介绍请参考:NodeMCU-32S简介
2. Arduino IDE 开发环境配置¶
2.1. 准备工作¶
· 安装Arduino IDE
· 安装ESP32开发板的USB转UART驱动
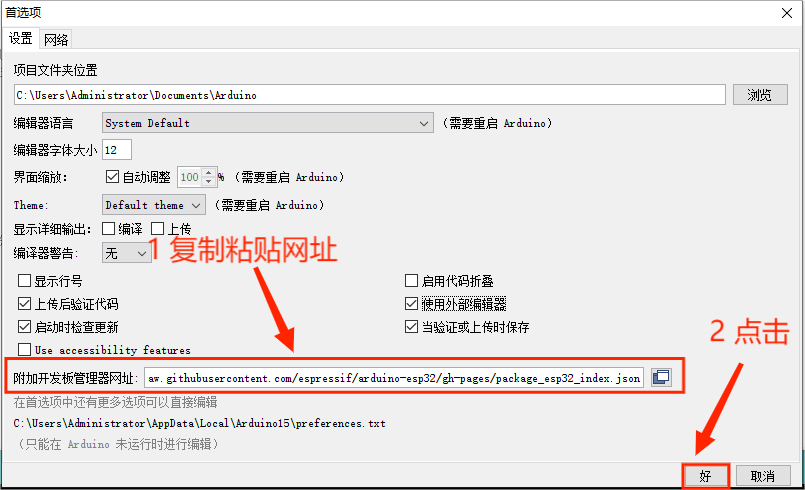
2.2. 安装ESP32的拓展包¶
文件→首选项→附加开发板管理器网址,粘贴网址:
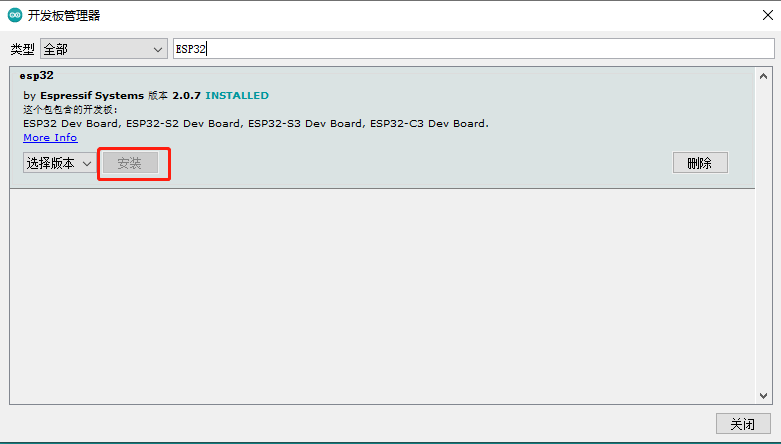
工具→开发板→开发板管理器,搜索"esp32"或"ESP32"
找到乐鑫官方的库,安装
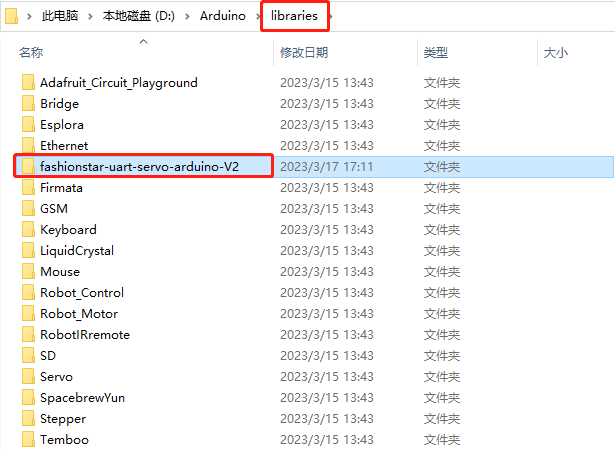
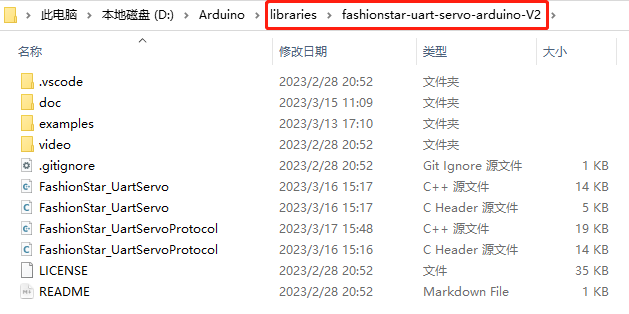
2.3. 安装总线伺服舵机的Arduino库¶
将fashionstar-uart-servo-arduino-V2这个工程文件,整体拷贝到Arduino IDE安装路径下的libraries这个文件夹
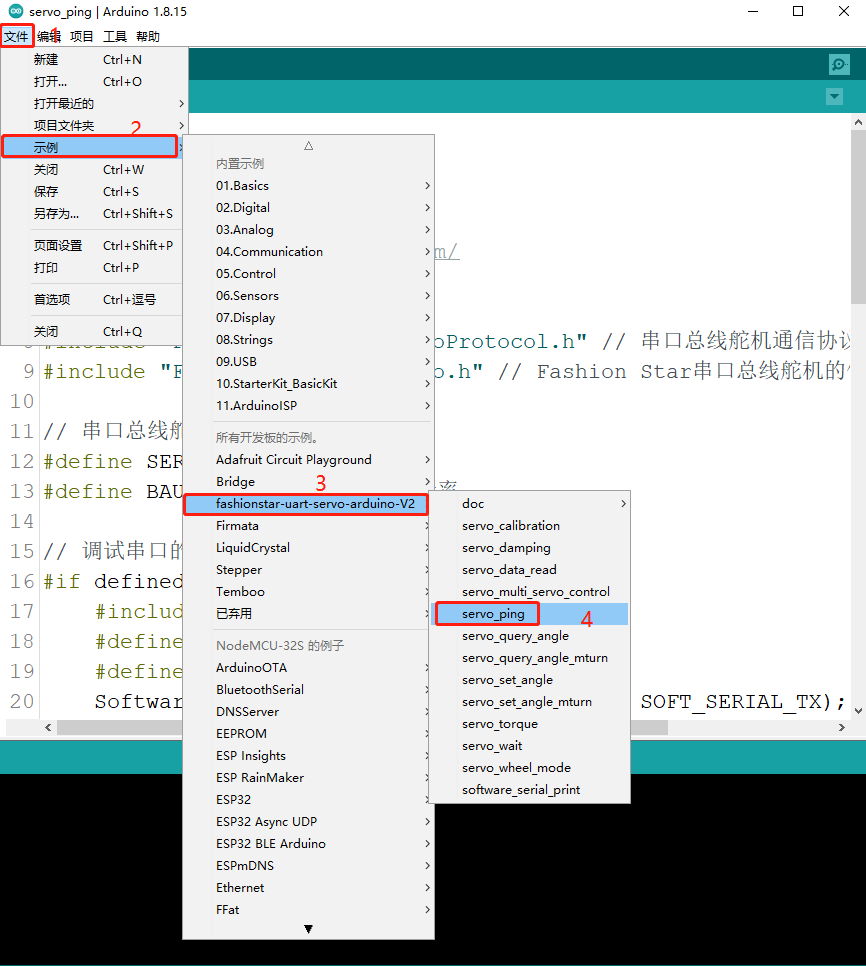
2.4. 打开示例代码¶
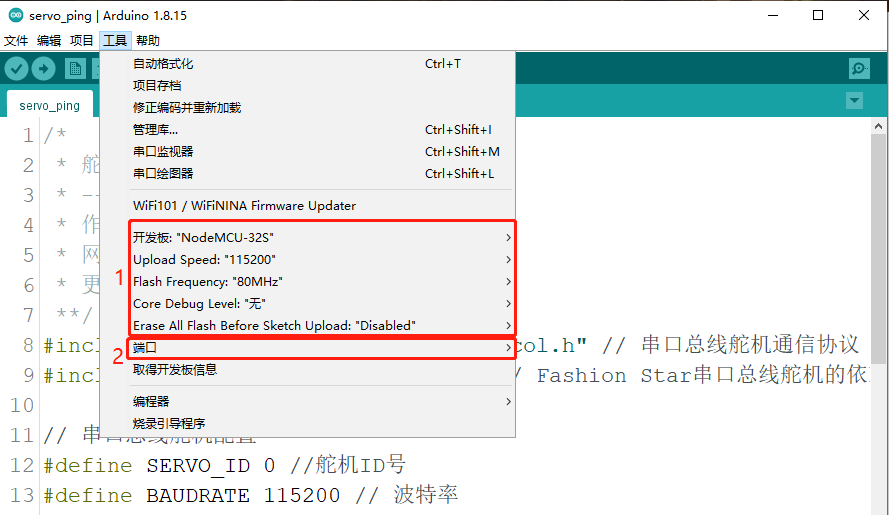
2.5. 开发板与端口号选择¶
下图是以NodeMCU32S为例,在开发板选择区选择你所用的ESP32开发板的型号及端口号:
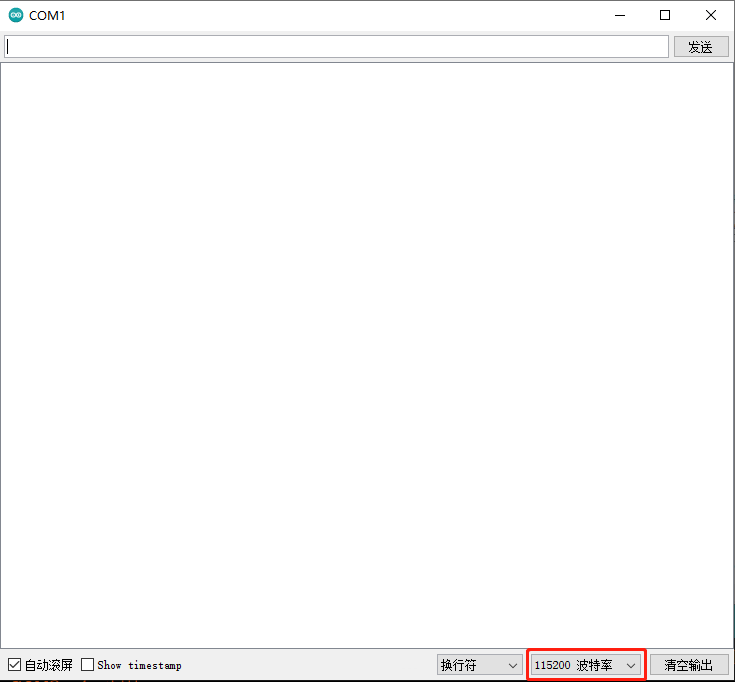
2.6. 查看日志输出¶
注意:
固件烧录的时候,需要先关闭串口监视器
选择串口监视器:

波特率选择115200
3. 舵机对象的创建与初始化¶
#include "FashionStar_UartServoProtocol.h" // 总线伺服舵机通信协议
#include "FashionStar_UartServo.h" // 总线伺服舵机SDK
FashionStar_UartServoProtocol用来处理舵机的底层通信协议的逻辑(如数据帧的收发、数据校验等)
FashionStar_UartServo是舵机的SDK,是在协议上层的更高一级的封装
创建一个总线伺服舵机通信协议对象FSUS_Protocol,构造器里面需要填写Arduino与总线伺服舵机通信的波特率,默认为115200
创建一个FSUS_Servo舵机对象,创建的时候需要传入舵机的ID,以及通信协议对象的指针&protocol,舵机的ID取值范围为0-254
接下来需要在setup()函数里对通信协议对象以及舵机对象进行初始化
4. 舵机通信检测¶
4.1. API-ping¶
调用舵机的ping()函数用于舵机的通信检测,判断舵机是否在线
4.2. 例程源码¶
/*
* 舵机通信检测
* --------------------------
* 作者: 深圳市华馨京科技有限公司
* 网站:https://fashionrobo.com/
* 更新时间: 2023/03/13
**/
#include "FashionStar_UartServoProtocol.h" // 总线伺服舵机通信协议
#include "FashionStar_UartServo.h" // Fashion Star总线伺服舵机的依赖
// 总线伺服舵机配置
#define SERVO_ID 0 //舵机ID号
#define BAUDRATE 115200 // 波特率
// 调试串口的配置
#if defined(ARDUINO_AVR_UNO)
#include <SoftwareSerial.h>
#define SOFT_SERIAL_RX 6
#define SOFT_SERIAL_TX 7
SoftwareSerial softSerial(SOFT_SERIAL_RX, SOFT_SERIAL_TX); // 创建软串口
#define DEBUG_SERIAL softSerial
#define DEBUG_SERIAL_BAUDRATE 4800
#elif defined(ARDUINO_AVR_MEGA2560)
#define DEBUG_SERIAL Serial
#define DEBUG_SERIAL_BAUDRATE 115200
#elif defined(ARDUINO_ARCH_ESP32)
#define DEBUG_SERIAL Serial
#define DEBUG_SERIAL_BAUDRATE 115200
#elif defined(ARDUINO_ARCH_STM32)
#include <HardwareSerial.h>
// RX TX
HardwareSerial Serial1(PA10, PA9);
//HardwareSerial Serial2(PA3, PA2); //这里串口2不需要定义
HardwareSerial Serial3(PB11, PB10);
#define DEBUG_SERIAL Serial1
#define DEBUG_SERIAL_BAUDRATE (uint32_t)115200
#endif
FSUS_Protocol protocol(BAUDRATE); //协议
FSUS_Servo uservo(SERVO_ID, &protocol); // 创建舵机
void setup(){
protocol.init(); // 舵机通信协议初始化
uservo.init(); // 总线伺服舵机初始化
// 打印例程信息
DEBUG_SERIAL.begin(DEBUG_SERIAL_BAUDRATE);
DEBUG_SERIAL.println("Start To Ping Servo\n");
}
void loop(){
bool isOnline = uservo.ping(); // 舵机通信检测
String message = "servo #"+String(uservo.servoId,DEC) + " is "; // 日志输出
if(isOnline){
message += "online";
}else{
message += "offline";
}
// 调试串口初始化
DEBUG_SERIAL.println(message);
// 等待1s
delay(1000);
}
日志输出
5. 舵机阻尼模式¶
5.1. API-setDamping¶
设置舵机为阻尼模式
输入参数
· power舵机的功率,单位mW,功率值越大,旋转舵机的时候阻尼力也就越大
使用示例
5.2. 例程源码¶
/*
* 设置舵机为阻尼模式
* 调整参数`DAMPING_POWER`感受不同的阻尼力
* --------------------------
* 作者: 深圳市华馨京科技有限公司
* 网站:https://fashionrobo.com/
* 更新时间: 2023/03/13
**/
#include "FashionStar_UartServoProtocol.h"
#include "FashionStar_UartServo.h" // Fashion Star总线伺服舵机的依赖
// 总线伺服舵机配置参数
#define SERVO_ID 0 //舵机ID号
#define BAUDRATE 115200 // 波特率
#define DAMPING_POWER 800 // 阻尼模式下的功率(单位mW) 500,800,1000
// 调试串口的配置
#if defined(ARDUINO_AVR_UNO)
#include <SoftwareSerial.h>
#define SOFT_SERIAL_RX 6
#define SOFT_SERIAL_TX 7
SoftwareSerial softSerial(SOFT_SERIAL_RX, SOFT_SERIAL_TX); // 创建软串口
#define DEBUG_SERIAL softSerial
#define DEBUG_SERIAL_BAUDRATE 4800
#elif defined(ARDUINO_AVR_MEGA2560)
#define DEBUG_SERIAL Serial
#define DEBUG_SERIAL_BAUDRATE 115200
#elif defined(ARDUINO_ARCH_ESP32)
#define DEBUG_SERIAL Serial
#define DEBUG_SERIAL_BAUDRATE 115200
#elif defined(ARDUINO_ARCH_STM32)
#include <HardwareSerial.h>
// RX TX
HardwareSerial Serial1(PA10, PA9);
//HardwareSerial Serial2(PA3, PA2); //这里串口2不需要定义
HardwareSerial Serial3(PB11, PB10);
#define DEBUG_SERIAL Serial1
#define DEBUG_SERIAL_BAUDRATE (uint32_t)115200
#endif
FSUS_Protocol protocol(BAUDRATE); //协议
FSUS_Servo uservo(SERVO_ID, &protocol); // 创建舵机
void setup(){
protocol.init(); // 通信协议初始化
uservo.init(); // 舵机初始化
// 打印日志
DEBUG_SERIAL.begin(DEBUG_SERIAL_BAUDRATE);
DEBUG_SERIAL.println("Set Servo Mode To Damping");
// 设置电机的阻尼系数
uservo.setDamping(DAMPING_POWER);
}
void loop(){
// TODO;
}
日志输出
6. 舵机角度查询¶
6.1. API-queryAngle¶
查询舵机当前的真实角度,向舵机发送角度查询指令,并将角度值赋值给舵机对象的curAngle属性
输入参数
· <无>
输出参数
· curAngle舵机当前的真实角度
使用示例
示例1
示例2
6.2. 例程源码-查询角度(单圈)¶
/*
* 舵机角度回读实验
* 用手掰动舵机, 角度回读并将角度读数通过SPI发送
* --------------------------
* 作者: 深圳市华馨京科技有限公司
* 网站:https://fashionrobo.com/
* 更新时间: 2023/03/13
**/
#include "FashionStar_UartServoProtocol.h"
#include "FashionStar_UartServo.h" // Fashion Star总线伺服舵机的依赖
// 总线伺服舵机配置
#define SERVO_ID 0 //舵机ID号
#define DAMPING_POWER 800 // 阻尼模式下的功率(单位mW) 500,800,1000
#define BAUDRATE 115200 // 波特率
// 调试串口的配置
#if defined(ARDUINO_AVR_UNO)
#include <SoftwareSerial.h>
#define SOFT_SERIAL_RX 6
#define SOFT_SERIAL_TX 7
SoftwareSerial softSerial(SOFT_SERIAL_RX, SOFT_SERIAL_TX); // 创建软串口
#define DEBUG_SERIAL softSerial
#define DEBUG_SERIAL_BAUDRATE 4800
#elif defined(ARDUINO_AVR_MEGA2560)
#define DEBUG_SERIAL Serial
#define DEBUG_SERIAL_BAUDRATE 115200
#elif defined(ARDUINO_ARCH_ESP32)
#define DEBUG_SERIAL Serial
#define DEBUG_SERIAL_BAUDRATE 115200
#elif defined(ARDUINO_ARCH_STM32)
#include <HardwareSerial.h>
// RX TX
HardwareSerial Serial1(PA10, PA9);
//HardwareSerial Serial2(PA3, PA2); //这里串口2不需要定义
HardwareSerial Serial3(PB11, PB10);
#define DEBUG_SERIAL Serial1
#define DEBUG_SERIAL_BAUDRATE (uint32_t)115200
#endif
FSUS_Protocol protocol(BAUDRATE); //协议
FSUS_Servo uservo(SERVO_ID, &protocol); // 创建舵机
void setup(){
protocol.init(); // 通信协议初始化
uservo.init(); //舵机角度初始化
uservo.setDamping(DAMPING_POWER); // 舵机设置为阻尼模式
// 打印例程信息
DEBUG_SERIAL.begin(DEBUG_SERIAL_BAUDRATE);
DEBUG_SERIAL.println("Query Servo Angle\n");
}
void loop(){
// 舵机角度查询 (更新角度)
uservo.queryRawAngle();
// 日志输出
String message = "Status Code: " + String(uservo.protocol->responsePack.recv_status, DEC) + " servo #"+String(uservo.servoId, DEC) + " , Current Angle = "+String(uservo.curRawAngle, 1)+" deg";
DEBUG_SERIAL.println(message);
// 等待1s
delay(1000);
}
日志输出
Query Servo Angle
Status Code: 0 servo #0 , Current Angle = -99.0
Status Code: 0 servo #0 , Current Angle = -99.0
Status Code: 0 servo #0 , Current Angle = -99.0
7. 舵机轮式模式(316版本以及后续版本已弃用)¶
7.1. API-wheelStop¶
轮式模式,停止旋转
函数原型
输入参数
· <无>
7.2. API-wheelRun¶
轮子持续旋转
函数原型
输入参数
· is_cw 轮子的旋转方向
0:逆时针
1:顺时针
7.3. API-wheelRunNTime¶
轮子旋转特定的时间
函数原型
输入参数
· is_cw 轮子的旋转方向
0:逆时针
1:顺时针
· time_ms 持续旋转的时间,单位为ms
7.4. API-wheelRunNCircle¶
轮子旋转特定的圈数
函数原型
输入参数
· is_cw 轮子的旋转方向
0:逆时针
1:顺时针
· circle_num 轮子旋转的圈数
7.5. 例程源码¶
/*
* 测试舵机轮式模式
* 提示: 拓展板上电之后, 记得按下Arduino的RESET按键
* --------------------------
* 作者: 深圳市华馨京科技有限公司
* 网站:https://fashionrobo.com/
* 更新时间: 2023/03/13
*/
#include "FashionStar_UartServoProtocol.h"
#include "FashionStar_UartServo.h" // Fashion Star总线伺服舵机的依赖
// 配置参数
#define BAUDRATE 115200 // 波特率
#define SERVO_ID 0 //舵机ID号
FSUS_Protocol protocol(BAUDRATE); //协议
FSUS_Servo uservo(SERVO_ID, &protocol); // 创建舵机
/* 轮子持续旋转指令与停止指令测试 */
void testWheelRunAndStop(){
uservo.wheelRun(FSUS_CCW); // 轮子持续旋转, 方向为逆时针
delay(2000); // 等待2s
uservo.wheelStop();
delay(2000); // 等待2s
uservo.wheelRun(FSUS_CW); // 轮子持续旋转
delay(2000); // 等待2s
uservo.wheelStop();
delay(2000); // 等待2s
}
/* 测试轮子旋转特定的时间 */
void testWheelRunNTime(){
uservo.wheelRunNTime(FSUS_CW, 5000); // 轮子持续旋转5s(顺时针)
delay(5000);
uservo.wheelRunNTime(FSUS_CCW, 5000); // 轮子持续旋转5s(逆时针)
delay(5000);
}
/* 测试轮子旋转特定的圈数 */
void testWheelRunNCircle(){
uint16_t nCircle = 2; // 旋转圈数
uint16_t delayMsEstimate = (uint16_t)(360.0 * nCircle / uservo.speed * 1000); // 估计旋转的时间
uservo.wheelRunNCircle(FSUS_CW, 2); // 轮子持续旋转2圈(顺时针)
delay(delayMsEstimate); // 等到轮子旋转到特定的位置
uservo.wheelRunNCircle(FSUS_CCW, 2);// 轮子持续旋转2圈(逆时针)
delay(delayMsEstimate); // 等到轮子旋转到特定的位置}
}
void setup(){
protocol.init(); // 通信协议初始化
uservo.init(); //舵机角度初始化
uservo.setSpeed(100); // 设置转速为20°/s
// 测试持续旋转与停止
// testRunAndStop();
// 测试旋转特定的时间
// testWheelRunNTime();
// 测试旋转特定的圈数
testWheelRunNCircle();
}
void loop(){
}
8. 设置舵机角度¶
8.1. API-setAngle¶
设定舵机的角度
函数原型
/* 设置舵机的原始角度 */
void FSUS_Servo::setRawAngle(FSUS_SERVO_ANGLE_T rawAngle, FSUS_INTERVAL_T interval, FSUS_POWER_T power)
输入参数
· rawAngle:舵机的目标角度,单位°
· interval: 舵机旋转的周期,单位ms
· power:最大功率,单位mW
8.2. API-setRawAngleByInterval¶
函数原型
// 设置舵机的原始角度(指定周期)
void FSUS_Servo::setRawAngleByInterval(FSUS_SERVO_ANGLE_T rawAngle, FSUS_INTERVAL_T interval, FSUS_INTERVAL_T t_acc, FSUS_INTERVAL_T t_dec, FSUS_POWER_T power)
输入参数
· rawAngle:舵机的目标角度,单位°
· interval: 舵机旋转的周期, 单位ms
· t_acc : 加速时间
· t_dec: 减速时间
· power :最大功率, 单位mW
8.3. API-setRawAngleByVelocity¶
函数原型
// 设定舵机的原始角度(指定转速)
void FSUS_Servo::setRawAngleByVelocity(FSUS_SERVO_ANGLE_T rawAngle, FSUS_SERVO_SPEED_T velocity, FSUS_INTERVAL_T t_acc, FSUS_INTERVAL_T t_dec, FSUS_POWER_T power)
输入参数
· rawAngle:舵机的目标角度,单位°
· velocity:舵机旋转的转速,单位°/s
· t_acc:加速时间
· t_dec:减速时间
· power:最大功率,单位mW
8.4. API-isStop¶
· 判断舵机是否在旋转,是否是静止
· 改函数在执行的时候,会先查询舵机当前的角度,返回对比跟目标角度targetAngle之间的差值是否小于控制死区
函数原型
输入参数
· <无>
返回参数
· is_stop:
true:舵机已经到达目标角度, 停下来了
false:舵机还没有到达目标角度,正在旋转
8.5. API-setRange¶
设置舵机的角度范围
函数原型
输入参数
· minAngle:舵机角度下限
· maxAngle:舵机角度上限
输出参数
· <无>
8.6. 例程源码¶
/*
* 设置舵机的角度(单圈模式)
* 提示: 拓展板上电之后, 记得按下Arduino的RESET按键
* --------------------------
* 作者: 深圳市华馨京科技有限公司
* 网站:https://fashionrobo.com/
* 更新时间: 2023/03/13
*/
#include "FashionStar_UartServoProtocol.h"
#include "FashionStar_UartServo.h" // Fashion Star总线伺服舵机的依赖
// 总线伺服舵机配置参数
#define SERVO_ID 0 //舵机ID号
#define BAUDRATE 115200 // 波特率
// 调试串口的配置
#if defined(ARDUINO_AVR_UNO)
#include <SoftwareSerial.h>
#define SOFT_SERIAL_RX 6
#define SOFT_SERIAL_TX 7
SoftwareSerial softSerial(SOFT_SERIAL_RX, SOFT_SERIAL_TX); // 创建软串口
#define DEBUG_SERIAL softSerial
#define DEBUG_SERIAL_BAUDRATE 4800
#elif defined(ARDUINO_AVR_MEGA2560)
#define DEBUG_SERIAL Serial
#define DEBUG_SERIAL_BAUDRATE 115200
#elif defined(ARDUINO_ARCH_ESP32)
#define DEBUG_SERIAL Serial
#define DEBUG_SERIAL_BAUDRATE 115200
#elif defined(ARDUINO_ARCH_STM32)
#include <HardwareSerial.h>
// RX TX
HardwareSerial Serial1(PA10, PA9);
//HardwareSerial Serial2(PA3, PA2); //这里串口2不需要定义
HardwareSerial Serial3(PB11, PB10);
#define DEBUG_SERIAL Serial1
#define DEBUG_SERIAL_BAUDRATE (uint32_t)115200
#endif
FSUS_Protocol protocol(BAUDRATE); //协议
FSUS_Servo uservo(SERVO_ID, &protocol); // 创建舵机
uint16_t interval; // 运行周期 单位ms
uint16_t t_acc; // 加速时间 单位ms
uint16_t t_dec; // 减速时间 单位ms
float velocity; // 目标转速 单位°/s
/* 等待并报告当前的角度*/
void waitAndReport(){
uservo.wait(); // 等待舵机旋转到目标角度
DEBUG_SERIAL.println("Real Angle = " + String(uservo.curRawAngle, 1) + " Target Angle = "+String(uservo.targetRawAngle, 1));
delay(2000); // 暂停2s
}
void setup(){
protocol.init(); // 通信协议初始化
uservo.init(); //舵机角度初始化
// 打印例程信息
DEBUG_SERIAL.begin(DEBUG_SERIAL_BAUDRATE); // 初始化软串口的波特率
DEBUG_SERIAL.println("Set Servo Angle");
}
void loop(){
DEBUG_SERIAL.println("Set Angle = 90°");
uservo.setRawAngle(90.0); // 设置舵机的角度
waitAndReport();
delay(2000);
DEBUG_SERIAL.println("Set Angle = -90°");
uservo.setRawAngle(-90);
waitAndReport();
delay(2000);
DEBUG_SERIAL.println("Set Angle = 90° - Set Interval = 500ms");
interval = 1000;
t_acc = 100;
t_dec = 100;
uservo.setRawAngleByInterval(90, interval, t_acc, t_dec, 0);
waitAndReport();
delay(2000);
DEBUG_SERIAL.println("Set Angle = -90° - Set Velocity = 200°/s");
velocity = 200.0;
t_acc = 100;
t_dec = 100;
uservo.setRawAngleByVelocity(-90, velocity, t_acc, t_dec, 0);
waitAndReport();
delay(2000);
}
日志输出
Set Angle = 90°
Real Angle = 89.7 Target Angle = 90.0
Set Angle = -90°
Real Angle = -89.6 Target Angle = -90.0
Set Angle = 90° - Set Interval = 500ms
Real Angle = 89.7 Target Angle = 90.0
Set Angle = -90° - Set Velocity = 200°/s
Real Angle = -89.6 Target Angle = -90.0
9. 舵机阻塞式等待¶
9.1. API-wait¶
等待舵机旋转到目标角度,阻塞式
函数原型
输入参数
· <无>
输出参数
· <无>
9.2. 例程源码¶
/*
* 测试wait()函数,轮询角度直到舵机旋转到目标位置
* 提示: 拓展板上电之后, 记得按下Arduino的RESET按键
* --------------------------
* 作者: 深圳市华馨京科技有限公司
* 网站:https://fashionrobo.com/
* 更新时间: 2023/03/13
*/
#include "FashionStar_UartServoProtocol.h"
#include "FashionStar_UartServo.h" // Fashion Star总线伺服舵机的依赖
// 总线伺服舵机配置参数
#define SERVO_ID 0 //舵机ID号
#define BAUDRATE 115200 // 波特率
// 调试串口的配置
#if defined(ARDUINO_AVR_UNO)
#include <SoftwareSerial.h>
#define SOFT_SERIAL_RX 6
#define SOFT_SERIAL_TX 7
SoftwareSerial softSerial(SOFT_SERIAL_RX, SOFT_SERIAL_TX); // 创建软串口
#define DEBUG_SERIAL softSerial
#define DEBUG_SERIAL_BAUDRATE 4800
#elif defined(ARDUINO_AVR_MEGA2560)
#define DEBUG_SERIAL Serial
#define DEBUG_SERIAL_BAUDRATE 115200
#elif defined(ARDUINO_ARCH_ESP32)
#define DEBUG_SERIAL Serial
#define DEBUG_SERIAL_BAUDRATE 115200
#elif defined(ARDUINO_ARCH_STM32)
#include <HardwareSerial.h>
// RX TX
HardwareSerial Serial1(PA10, PA9);
//HardwareSerial Serial2(PA3, PA2); //这里串口2不需要定义
HardwareSerial Serial3(PB11, PB10);
#define DEBUG_SERIAL Serial1
#define DEBUG_SERIAL_BAUDRATE (uint32_t)115200
#endif
FSUS_Protocol protocol(BAUDRATE); //协议
FSUS_Servo uservo(SERVO_ID, &protocol); // 创建舵机
void setup(){
protocol.init(); // 通信协议初始化
uservo.init(); //舵机初始化
// 打印例程信息
DEBUG_SERIAL.begin(DEBUG_SERIAL_BAUDRATE);
DEBUG_SERIAL.println("Test Wait");
}
void loop(){
DEBUG_SERIAL.println("Set Angle = 90.0");
uservo.setAngle(90.0); // 设置舵机的角度
uservo.wait();
DEBUG_SERIAL.println("Real Angle = "+String(uservo.curRawAngle, 2));
DEBUG_SERIAL.println("Set Angle = -90.0");
uservo.setAngle(-90);
uservo.wait();
DEBUG_SERIAL.println("Real Angle = "+String(uservo.curRawAngle, 2));
}
日志输出
Set Angle = -90.0
Real Angle = -89.00
Set Angle = 90.0
Real Angle = 89.80
Set Angle = -90.0
Real Angle = -89.00
Set Angle = 90.0
Real Angle = 89.80
Set Angle = -90.0
Real Angle = -89.00
Set Angle = 90.0
Real Angle = 89.80
Set Angle = -90.0
Real Angle = -89.00
10. 设置舵机角度-多圈模式¶
10.1. API-setRawAngleMTurn¶
函数原型
// 设定舵机的原始角度(多圈)
void FSUS_Servo::setRawAngleMTurn(FSUS_SERVO_ANGLE_T rawAngle, FSUS_INTERVAL_T_MTURN interval, FSUS_POWER_T power)
// 设定舵机的原始角度(多圈)
void FSUS_Servo::setRawAngleMTurn(FSUS_SERVO_ANGLE_T rawAngle, FSUS_INTERVAL_T_MTURN interval)
输入参数
· rawAngle :舵机的目标角度,单位 °
· interval :舵机旋转的周期, 单位ms
· power :最大功率,单位mW
输出参数
· <无>
10.2. API-setRawAngleByInterval¶
函数原型
// 设定舵机的原始角度(多圈+指定周期)
void FSUS_Servo::setRawAngleMTurnByInterval(FSUS_SERVO_ANGLE_T rawAngle, FSUS_INTERVAL_T_MTURN interval, FSUS_INTERVAL_T t_acc, FSUS_INTERVAL_T t_dec, FSUS_POWER_T power)
输入参数
· rawAngle :舵机的目标角度,单位 °
· interval :舵机旋转的周期, 单位ms
· t_acc :加速时间,单位ms
· t_dec :减速时间,单位ms
· power :最大功率,单位mW
输出参数
· <无>
10.3. API-setRawAngleMTurnByVelocity¶
函数原型
// 设定舵机的原始角度(多圈+指定转速)
void FSUS_Servo::setRawAngleMTurnByVelocity(FSUS_SERVO_ANGLE_T rawAngle, FSUS_SERVO_SPEED_T velocity, FSUS_INTERVAL_T t_acc, FSUS_INTERVAL_T t_dec, FSUS_POWER_T power)
输入参数
· rawAngle :舵机的目标角度,单位°
· velocity :舵机旋转的速度,单位°/s
· t_acc : 加速时间,单位ms
· t_dec : 减速时间,单位ms
· power : 最大功率,单位mW
输出参数
· <无>
10.4. 例程源码¶
/*
* 设置舵机的角度(多圈模式)
* 提示: 拓展板上电之后, 记得按下Arduino的RESET按键
* --------------------------
* 作者: 深圳市华馨京科技有限公司
* 网站:https://fashionrobo.com/
* 更新时间: 2023/03/13
*/
#include "FashionStar_UartServoProtocol.h"
#include "FashionStar_UartServo.h" // Fashion Star总线伺服舵机的依赖
// 总线伺服舵机配置参数
#define SERVO_ID 0 //舵机ID号
#define BAUDRATE 115200 // 波特率
// 调试串口的配置
#if defined(ARDUINO_AVR_UNO)
#include <SoftwareSerial.h>
#define SOFT_SERIAL_RX 6
#define SOFT_SERIAL_TX 7
SoftwareSerial softSerial(SOFT_SERIAL_RX, SOFT_SERIAL_TX); // 创建软串口
#define DEBUG_SERIAL softSerial
#define DEBUG_SERIAL_BAUDRATE 4800
#elif defined(ARDUINO_AVR_MEGA2560)
#define DEBUG_SERIAL Serial
#define DEBUG_SERIAL_BAUDRATE 115200
#elif defined(ARDUINO_ARCH_ESP32)
#define DEBUG_SERIAL Serial
#define DEBUG_SERIAL_BAUDRATE 115200
#elif defined(ARDUINO_ARCH_STM32)
#include <HardwareSerial.h>
// RX TX
HardwareSerial Serial1(PA10, PA9);
//HardwareSerial Serial2(PA3, PA2); //这里串口2不需要定义
HardwareSerial Serial3(PB11, PB10);
#define DEBUG_SERIAL Serial1
#define DEBUG_SERIAL_BAUDRATE (uint32_t)115200
#endif
FSUS_Protocol protocol(BAUDRATE); //协议
FSUS_Servo uservo(SERVO_ID, &protocol); // 创建舵机
uint32_t interval; // 运行周期 单位ms
uint16_t t_acc; // 加速时间 单位ms
uint16_t t_dec; // 减速时间 单位ms
float velocity; // 目标转速 单位°/s
/* 等待并报告当前的角度*/
void waitAndReport(){
uservo.wait(); // 等待舵机旋转到目标角度
DEBUG_SERIAL.println("Real Angle = " + String(uservo.curRawAngle, 1) + " Target Angle = "+String(uservo.targetRawAngle, 1));
delay(2000); // 暂停2s
}
void setup(){
protocol.init(); // 通信协议初始化
uservo.init(); //舵机角度初始化
// 打印例程信息
DEBUG_SERIAL.begin(DEBUG_SERIAL_BAUDRATE); // 初始化软串口的波特率
DEBUG_SERIAL.println("Set Servo Angle");
}
void loop(){
DEBUG_SERIAL.println("Set Angle = 900°");
uservo.setRawAngleMTurn(900.0); // 设置舵机的角度
waitAndReport();
DEBUG_SERIAL.println("Set Angle = -900.0°");
uservo.setRawAngleMTurn(-900.0);
waitAndReport();
DEBUG_SERIAL.println("Set Angle = 900° - Set Interval = 10s");
interval = 10000;
t_acc = 100;
t_dec = 100;
uservo.setRawAngleMTurnByInterval(900, interval, t_acc, t_dec, 0);
waitAndReport();
DEBUG_SERIAL.println("Set Angle = -900° - Set Velocity = 200°/s");
velocity = 200.0;
t_acc = 100;
t_dec = 100;
uservo.setRawAngleMTurnByVelocity(-900, velocity, t_acc, t_dec, 0);
waitAndReport();
}
日志输出
Set Angle = 900°
Set Servo Angle
Set Angle = 900°
Real Angle = 899.0 Target Angle = 900.0
Set Angle = -900.0°
Real Angle = -899.0 Target Angle = -900.0
Set Angle = 900° - Set Interval = 10s
Real Angle = 899.0 Target Angle = 900.0
Set Angle = -900° - Set Velocity = 200°/s
Real Angle = -899.0 Target Angle = -900.0
11. 舵机扭力开关¶
11.1. API-setTorque¶
函数原型
输入参数
· enable: 扭力是否开启
true :开启扭力
false:关闭扭力
使用示例
11.2. 例程源码¶
/*
* 测试舵机扭力开关
* 提示: 拓展板上电之后, 记得按下Arduino的RESET按键
* --------------------------
* 作者: 深圳市华馨京科技有限公司
* 网站:https://fashionrobo.com/
* 更新时间: 2023/03/13
*/
#include "FashionStar_UartServoProtocol.h"
#include "FashionStar_UartServo.h" // Fashion Star总线伺服舵机的依赖
// 配置参数
#define BAUDRATE 115200 // 波特率
#define SERVO_ID 0 //舵机ID号
FSUS_Protocol protocol; //协议
FSUS_Servo uservo(SERVO_ID, &protocol); // 创建舵机
void setup(){
protocol.init(); // 通信协议初始化
uservo.init(); //舵机初始
uservo.setTorque(true); // 开启扭力
// uservo.setTorque(false); // 开启扭力
}
void loop(){
}
12. 舵机标定¶
12.1. API-calibration¶
在FSUS_Servo类里面,有两个跟标定相关的参数:
class FSUS_Servo{
public:
...
float kAngleReal2Raw; // 舵机标定数据-舵机角度与位置之间的比例系数
float bAngleReal2Raw; // 舵机标定数据-舵机角度与位置转换过程中的偏移量
...
}
舵机真实角度跟原始角度的映射关系如下:
函数原型
void FSUS_Servo::calibration(FSUS_SERVO_ANGLE_T rawA, FSUS_SERVO_ANGLE_T realA, FSUS_SERVO_ANGLE_T rawB, FSUS_SERVO_ANGLE_T realB)
输入参数
· rawA 在位置A时刻舵机原始的角度
· realA 在位置A时刻舵机真实的角度
· rawB 在位置B时刻舵机原始的角度
· realB 在位置B时刻舵机真实的角度
使用示例
// 设置舵机的标定点
// 样本1
#define SERVO_REAL_ANGLE_A 90 // 舵机真实角度
#define SERVO_RAW_ANGLE_A -86.2 // 舵机原始角度
// 样本2
#define SERVO_REAL_ANGLE_B -90 // 舵机真实角度
#define SERVO_RAW_ANGLE_B 91.9 // 舵机原始角度
// 输入舵机标定数据
uservo.calibration(
SERVO_RAW_ANGLE_A,SERVO_REAL_ANGLE_A,\
SERVO_RAW_ANGLE_B,SERVO_REAL_ANGLE_B);
函数原型
输入参数
· kAngleReal2Raw :舵机标定数据-舵机角度与位置之间的比例系数
· bAngleReal2Raw :舵机标定数据-舵机角度与位置转换过程中的偏移量
12.2. API-angleReal2Raw¶
舵机真实角度转换为舵机原始角度
函数原型
输入参数
· realAngle: 舵机真实角度
返回参数
· rawAngle: 舵机原始角度
12.3. API-angleRaw2Real¶
舵机原始角度转化为真实角度
函数原型
输入参数
· rawAngle: 舵机原始角度
返回参数
· realAngle: 舵机真实角度
12.4. 例程源码¶
/*
* 测试舵机标定
* 提示: 拓展板上电之后, 记得按下Arduino的RESET按键
* --------------------------
* 作者: 深圳市华馨京科技有限公司
* 网站:https://fashionrobo.com/
* 更新时间: 2023/03/13
*/
#include "FashionStar_UartServoProtocol.h"
#include "FashionStar_UartServo.h" // Fashion Star总线伺服舵机的依赖
// 总线伺服舵机配置参数
#define SERVO_ID 0 //舵机ID号
#define BAUDRATE 115200 // 波特率
// 设置舵机的标定点
// 样本1
#define SERVO_REAL_ANGLE_A 90 // 舵机真实角度
#define SERVO_RAW_ANGLE_A -86.2 // 舵机原始角度
// 样本2
#define SERVO_REAL_ANGLE_B -90 // 舵机真实角度
#define SERVO_RAW_ANGLE_B 91.9 // 舵机原始角度
// 调试串口的配置
#if defined(ARDUINO_AVR_UNO)
#include <SoftwareSerial.h>
#define SOFT_SERIAL_RX 6
#define SOFT_SERIAL_TX 7
SoftwareSerial softSerial(SOFT_SERIAL_RX, SOFT_SERIAL_TX); // 创建软串口
#define DEBUG_SERIAL softSerial
#define DEBUG_SERIAL_BAUDRATE 4800
#elif defined(ARDUINO_AVR_MEGA2560)
#define DEBUG_SERIAL Serial
#define DEBUG_SERIAL_BAUDRATE 115200
#elif defined(ARDUINO_ARCH_ESP32)
#define DEBUG_SERIAL Serial
#define DEBUG_SERIAL_BAUDRATE 115200
#elif defined(ARDUINO_ARCH_STM32)
#include <HardwareSerial.h>
// RX TX
HardwareSerial Serial1(PA10, PA9);
//HardwareSerial Serial2(PA3, PA2); //这里串口2不需要定义
HardwareSerial Serial3(PB11, PB10);
#define DEBUG_SERIAL Serial1
#define DEBUG_SERIAL_BAUDRATE (uint32_t)115200
#endif
FSUS_Protocol protocol(BAUDRATE); //协议
FSUS_Servo uservo(SERVO_ID, &protocol); // 创建舵机
void setup(){
protocol.init(); // 通信协议初始化
uservo.init(); //舵机角度初始化
// 调试串口初始化
DEBUG_SERIAL.begin(DEBUG_SERIAL_BAUDRATE); // 初始化软串口的波特率
DEBUG_SERIAL.println("Set Servo Angle");
// 输入舵机标定数据
uservo.calibration(
SERVO_RAW_ANGLE_A,SERVO_REAL_ANGLE_A,\
SERVO_RAW_ANGLE_B,SERVO_REAL_ANGLE_B);
// 打印舵机标定数据
DEBUG_SERIAL.println("kAngleReal2Raw = "+String(uservo.kAngleReal2Raw,2) + \
"; bAngleReal2Raw = " + String(uservo.bAngleReal2Raw, 2));
}
void loop(){
DEBUG_SERIAL.println("Set Angle = 90°");
uservo.setAngle(90.0); // 设置舵机的角度
uservo.wait();
delay(2000);
DEBUG_SERIAL.println("Set Angle = -90°");
uservo.setAngle(-90);
uservo.wait();
delay(2000);
}
日志输出
13. 舵机转速设置¶
13.1. API-setSpeed¶
函数原型
输入参数
· speed 舵机的平均转速, 单位°/s
返回参数
· <无>
14. 舵机数据读取¶
14.1. API¶
函数原型
uint16_t FSUS_Servo::queryVoltage()// 查询舵机的电压(单位mV)
uint16_t FSUS_Servo::queryCurrent()// 查询舵机的电流(单位mA)
uint16_t FSUS_Servo::queryPower()// 查询舵机的功率(单位mW)
uint16_t FSUS_Servo::queryTemperature()// 查询舵机的温度(单位 ADC)
uint8_t FSUS_Servo::queryStatus()// 查询舵机状态
输入参数
· <无>
返回参数
舵机的数据
14.2. 示例源码¶
/*
* 舵机数据读取实验
* --------------------------
* 作者: 深圳市华馨京科技有限公司
* 网站:https://fashionrobo.com/
* 更新时间: 2024/08/14
**/
#include "FashionStar_UartServoProtocol.h" // 总线伺服舵机通信协议
#include "FashionStar_UartServo.h" // Fashion Star总线伺服舵机的依赖
// 配置
#define SERVO_ID 0 // 舵机ID号
#define BAUDRATE 115200 // 波特率
// 调试串口的配置
#if defined(ARDUINO_AVR_UNO)
#include <SoftwareSerial.h>
#define SOFT_SERIAL_RX 6
#define SOFT_SERIAL_TX 7
SoftwareSerial softSerial(SOFT_SERIAL_RX, SOFT_SERIAL_TX); // 创建软串口
#define DEBUG_SERIAL softSerial
#define DEBUG_SERIAL_BAUDRATE 4800
#elif defined(ARDUINO_AVR_MEGA2560)
#define DEBUG_SERIAL Serial
#define DEBUG_SERIAL_BAUDRATE 115200
#elif defined(ARDUINO_ARCH_ESP32)
#define DEBUG_SERIAL Serial
#define DEBUG_SERIAL_BAUDRATE 115200
#elif defined(ARDUINO_ARCH_STM32)
#include <HardwareSerial.h>
// RX TX
HardwareSerial Serial1(PA10, PA9);
// HardwareSerial Serial2(PA3, PA2); //这里串口2不需要定义
HardwareSerial Serial3(PB11, PB10);
#define DEBUG_SERIAL Serial1
#define DEBUG_SERIAL_BAUDRATE (uint32_t)115200
#endif
FSUS_Protocol protocol(BAUDRATE); // 协议
FSUS_Servo uservo(SERVO_ID, &protocol); // 创建舵机
// 读取数据
uint16_t voltage; // 电压 mV
uint16_t current; // 电流 mA
uint16_t power; // 功率 mW
uint16_t temperature; // 温度 ADC
uint8_t status; // 状态
void setup()
{
protocol.init(); // 舵机通信协议初始化
uservo.init(); // 总线伺服舵机初始化
// 打印例程信息
DEBUG_SERIAL.begin(DEBUG_SERIAL_BAUDRATE);
DEBUG_SERIAL.println("Start To Test Servo Data Read \n"); // 打印日志
// uservo.setAngle(-25.0, 1000, 200); // 设置舵机角度(限制功率)
}
void loop()
{
// 读取电压数据
voltage = uservo.queryVoltage();
DEBUG_SERIAL.println("voltage: " + String((float)voltage, 1) + " mV");
delay(100);
// 读取电流数据
current = uservo.queryCurrent();
DEBUG_SERIAL.println("current: " + String((float)current, 1) + " mA");
delay(100);
// 读取功率数据
power = uservo.queryPower();
DEBUG_SERIAL.println("power: " + String((float)power, 1) + " mW");
delay(100);
// 读取温度数据,需要做ADC转℃
temperature = uservo.queryTemperature();
temperature = 1 / (log(temperature / (4096.0f - temperature)) / 3435.0f + 1 / (273.15 + 25)) - 273.15;
DEBUG_SERIAL.println("temperature: " + String((float)temperature, 1) + " Celsius");
// 读取工作状态数据
/*
BIT[0] - 执行指令置1,执行完成后清零。
BIT[1] - 执行指令错误置1,在下次正确执行后清零。
BIT[2] - 堵转错误置1,解除堵转后清零。
BIT[3] - 电压过高置1,电压恢复正常后清零。
BIT[4] - 电压过低置1,电压恢复正常后清零。
BIT[5] - 电流错误置1,电流恢复正常后清零。
BIT[6] - 功率错误置1,功率恢复正常后清零。
BIT[7] - 温度错误置1,温度恢复正常后清零。
*/
status = uservo.queryStatus();
char binStr[9]; // 8位二进制字符串加上终止符
for (int i = 7; i >= 0; i--) {
binStr[7 - i] = (status & (1 << i)) ? '1' : '0';
}
binStr[8] = '\0'; // 字符串终止符
DEBUG_SERIAL.print("WorkState: ");
DEBUG_SERIAL.println(binStr);
int bitValue = bitRead(status, 3);
//判断电压错误标志是否触发
if (bitValue)
{
DEBUG_SERIAL.println("voltage_high");
}
bitValue = bitRead(status, 4);
if (bitValue)
{
DEBUG_SERIAL.println("voltage_low");
}
delay(100);
delay(1000);
}
15. 多串口工作¶
15.1. 例程源码¶
/*
* 舵机角度模式 ESP32 多串口版本
* --------------------------
* 作者: 深圳市华馨京科技有限公司
* 网站:https://fashionrobo.com/
* 更新时间: 2023/03/13
**/
#include "FashionStar_UartServoProtocol.h" // 总线伺服舵机通信协议
#include "FashionStar_UartServo.h" // Fashion Star总线伺服舵机的依赖
// 总线伺服舵机配置
#define USERVO_BAUDRATE (uint32_t)115200 // 波特率
// 调试串口的配置
#define DEBUG_SERIAL Serial
#define DEBUG_SERIAL_BAUDRATE (uint32_t)115200
//多串口版本主要区别在于:串口舵机管理器&舵机挂载在串口上,2个部分//
// 串口1舵机管理器
FSUS_Protocol protocol_ch1(&Serial1, USERVO_BAUDRATE);
// 串口2舵机管理器
FSUS_Protocol protocol_ch2(&Serial2, USERVO_BAUDRATE);
// 舵机 #0 挂载在串口1上
FSUS_Servo uservo_0(0, &protocol_ch1); // 创建舵机
// 舵机 #1 挂载在串口2上
FSUS_Servo uservo_1(1, &protocol_ch2); // 创建舵机
///////////////////*请以上面串口1,2范例为标准*////////////////
void setup(){
// 总线伺服舵机 #0 初始化
uservo_0.init();
// 总线伺服舵机 #1 初始化
uservo_1.init();
// 打印例程信息
DEBUG_SERIAL.begin(DEBUG_SERIAL_BAUDRATE);
DEBUG_SERIAL.println("Start To Ping Servo\n");
}
void loop(){
// 舵机通讯检测
bool u0_valid = uservo_0.ping();
String message1 = "servo #"+String(uservo_0.servoId,DEC) + " is "; // 日志输出
if(u0_valid){
message1 += "online";
}else{
message1 += "offline";
}
// 调试串口初始化
DEBUG_SERIAL.println(message1);
// 舵机通讯检测
bool u1_valid = uservo_1.ping();
String message2 = "servo #"+String(uservo_1.servoId,DEC) + " is "; // 日志输出
if(u1_valid){
message2 += "online";
}else{
message2 += "offline";
}
// 调试串口初始化
DEBUG_SERIAL.println(message2);
DEBUG_SERIAL.println("Set Angle = 90°");
uservo_0.setRawAngle(90.0); // 设置舵机的角度
//waitAndReport();
DEBUG_SERIAL.println("Set Angle = 90°");
uservo_1.setRawAngle(90.0); // 设置舵机的角度
delay(2000);
DEBUG_SERIAL.println("Set Angle = -90°");
uservo_0.setRawAngle(-90);
DEBUG_SERIAL.println("Set Angle = -90°");
uservo_1.setRawAngle(-90);
// waitAndReport();
delay(2000);
}
16.原点设置¶
|
注意事项:
|
16.1. API-SetOriginPoint¶
函数原型
输入参数
- <无>
返回参数
- <无>
16.2.示例源码¶
servo_set_origin_point.ino
/*
* 设置舵机原点
* --------------------------
* 作者: 深圳市华馨京科技有限公司
* 网站:https://fashionrobo.com/
* 更新时间: 2024/08/14
**/
#include "FashionStar_UartServoProtocol.h" // 总线伺服舵机通信协议
#include "FashionStar_UartServo.h" // Fashion Star总线伺服舵机的依赖
// 总线伺服舵机配置
#define SERVO_ID 0 // 舵机ID号
#define BAUDRATE 115200 // 波特率
// 调试串口的配置
#if defined(ARDUINO_AVR_UNO)
#include <SoftwareSerial.h>
#define SOFT_SERIAL_RX 6
#define SOFT_SERIAL_TX 7
SoftwareSerial softSerial(SOFT_SERIAL_RX, SOFT_SERIAL_TX); // 创建软串口
#define DEBUG_SERIAL softSerial
#define DEBUG_SERIAL_BAUDRATE 4800
#elif defined(ARDUINO_AVR_MEGA2560)
#define DEBUG_SERIAL Serial
#define DEBUG_SERIAL_BAUDRATE 115200
#elif defined(ARDUINO_ARCH_ESP32)
#define DEBUG_SERIAL Serial
#define DEBUG_SERIAL_BAUDRATE 115200
#elif defined(ARDUINO_ARCH_STM32)
#include <HardwareSerial.h>
// RX TX
HardwareSerial Serial1(PA10, PA9);
// HardwareSerial Serial2(PA3, PA2); //这里串口2不需要定义
HardwareSerial Serial3(PB11, PB10);
#define DEBUG_SERIAL Serial1
#define DEBUG_SERIAL_BAUDRATE (uint32_t)115200
#endif
FSUS_Protocol protocol(BAUDRATE); // 协议
FSUS_Servo uservo(SERVO_ID, &protocol); // 创建舵机
void setup()
{
protocol.init(); // 舵机通信协议初始化
uservo.init(); // 总线伺服舵机初始化
// 打印例程信息
DEBUG_SERIAL.begin(DEBUG_SERIAL_BAUDRATE);
uservo.setTorque(0);
uservo.queryRawAngle();
// 输出查询信息
DEBUG_SERIAL.println("Before Set Origin Point: Servo Angle: " + String(uservo.curRawAngle, 1) + " deg");
uservo.SetOriginPoint();
delay(1000);
uservo.queryRawAngle();
DEBUG_SERIAL.println("After Set Origin Point: Servo Angle: " + String(uservo.curRawAngle, 1) + " deg");
}
void loop()
{
uservo.queryRawAngle();
String message = "Status Code: " + String(uservo.protocol->responsePack.recv_status, DEC) + " servo #" + String(uservo.servoId, DEC) + " , Current Angle = " + String(uservo.curRawAngle, 1) + " deg";
DEBUG_SERIAL.println(message);
delay(1000);
}
17.重设多圈角度¶
|
注意事项:
|
17.1. API-ResetMultiTurnAngle¶
函数原型
输入参数
- <无>
返回参数
- <无>
17.2.示例源码¶
servo_reset_multiturn_angle.ino
/*
* 舵机重设多圈角度
* 提示: 拓展板上电之后, 记得按下Arduino的RESET按键
* --------------------------
* 作者: 深圳市华馨京科技有限公司
* 网站:https://fashionrobo.com/
* 更新时间: 2024/12/17
*/
#include "FashionStar_UartServoProtocol.h"
#include "FashionStar_UartServo.h" // Fashion Star总线伺服舵机的依赖
// 串口总线舵机配置参数
#define SERVO_ID 0 //舵机ID号
#define BAUDRATE 115200 // 波特率
// 调试串口的配置
#if defined(ARDUINO_AVR_UNO)
#include <SoftwareSerial.h>
#define SOFT_SERIAL_RX 6
#define SOFT_SERIAL_TX 7
SoftwareSerial softSerial(SOFT_SERIAL_RX, SOFT_SERIAL_TX); // 创建软串口
#define DEBUG_SERIAL softSerial
#define DEBUG_SERIAL_BAUDRATE 115200
#elif defined(ARDUINO_AVR_MEGA2560)
#define DEBUG_SERIAL Serial
#define DEBUG_SERIAL_BAUDRATE 115200
#elif defined(ARDUINO_ARCH_ESP32)
#define DEBUG_SERIAL Serial
#define DEBUG_SERIAL_BAUDRATE 115200
#elif defined(ARDUINO_ARCH_STM32)
#include <HardwareSerial.h>
// RX TX
HardwareSerial Serial1(PA10, PA9);
//HardwareSerial Serial2(PA3, PA2); //这里串口2不需要定义
HardwareSerial Serial3(PB11, PB10);
#define DEBUG_SERIAL Serial1
#define DEBUG_SERIAL_BAUDRATE (uint32_t)115200
#endif
FSUS_Protocol protocol(BAUDRATE); //协议
FSUS_Servo uservo(SERVO_ID, &protocol); // 创建舵机
uint32_t interval; // 运行周期 单位ms
uint16_t t_acc; // 加速时间 单位ms
uint16_t t_dec; // 减速时间 单位ms
float velocity; // 目标转速 单位°/s
/* 等待并报告当前的角度*/
void waitAndReport(){ // 等待舵机旋转到目标角度
DEBUG_SERIAL.println("Real Angle = " + String(uservo.curRawAngle, 1) + " Target Angle = "+String(uservo.targetRawAngle, 1));
delay(5000); // 暂停2s
}
void setup(){
protocol.init(); // 通信协议初始化
uservo.init(); //舵机角度初始化
// 打印例程信息
DEBUG_SERIAL.begin(DEBUG_SERIAL_BAUDRATE); // 初始化软串口的波特率
DEBUG_SERIAL.println("Set Servo Angle");
}
void loop(){
uservo.setRawAngleMTurn(1000.0); // 设置舵机的角度
delay(7000);
uservo.queryRawAngleMTurn(); //读取角度
// 日志输出
String message = "Status Code: " + String(uservo.protocol->responsePack.recv_status, DEC) + " servo #"+String(uservo.servoId, DEC) + " , Current Angle = "+String(uservo.curRawAngle, 1)+" deg";
DEBUG_SERIAL.println(message);
// 等待1s
delay(1000);
uservo.StopOnControlUnloading(); //停止舵机(重置多圈需要在舵机停止状态)
delay(10);
uservo.ResetMultiTurnAngle(); //重置多圈
delay(10);
uservo.queryRawAngleMTurn(); //读取角度
message = "Status Code: " + String(uservo.protocol->responsePack.recv_status, DEC) + " servo #"+String(uservo.servoId, DEC) + " , Current Angle = "+String(uservo.curRawAngle, 1)+" deg";
DEBUG_SERIAL.println(message);
// 等待1s
delay(1000);
uservo.setRawAngleMTurn(-1000.0); // 设置舵机的角度
delay(7000);
uservo.queryRawAngleMTurn();
// 日志输出
message = "Status Code: " + String(uservo.protocol->responsePack.recv_status, DEC) + " servo #"+String(uservo.servoId, DEC) + " , Current Angle = "+String(uservo.curRawAngle, 1)+" deg";
DEBUG_SERIAL.println(message);
// 等待1s
delay(1000);
uservo.StopOnControlUnloading();
delay(10);
uservo.ResetMultiTurnAngle();
delay(10);
uservo.queryRawAngleMTurn();
message = "Status Code: " + String(uservo.protocol->responsePack.recv_status, DEC) + " servo #"+String(uservo.servoId, DEC) + " , Current Angle = "+String(uservo.curRawAngle, 1)+" deg";
DEBUG_SERIAL.println(message);
// 等待1s
delay(1000);
}
18.异步命令¶
|
注意事项:
|
18.1. API¶
函数原型
输入参数
· cancel :0 执行;1 取消
返回参数
- <无>
18.2.示例源码¶
servo_async.ino
/*
* 舵机异步命令
* 提示: 拓展板上电之后, 记得按下Arduino的RESET按键
* --------------------------
* 作者: 深圳市华馨京科技有限公司
* 网站:https://fashionrobo.com/
* 更新时间: 2024/12/17
*/
#include "FashionStar_UartServoProtocol.h"
#include "FashionStar_UartServo.h" // Fashion Star总线伺服舵机的依赖
// 串口总线舵机配置参数
#define SERVO_ID 3 //舵机ID号
#define BAUDRATE 115200 // 波特率
// 调试串口的配置
#if defined(ARDUINO_AVR_UNO)
#include <SoftwareSerial.h>
#define SOFT_SERIAL_RX 6
#define SOFT_SERIAL_TX 7
SoftwareSerial softSerial(SOFT_SERIAL_RX, SOFT_SERIAL_TX); // 创建软串口
#define DEBUG_SERIAL softSerial
#define DEBUG_SERIAL_BAUDRATE 115200
#elif defined(ARDUINO_AVR_MEGA2560)
#define DEBUG_SERIAL Serial
#define DEBUG_SERIAL_BAUDRATE 115200
#elif defined(ARDUINO_ARCH_ESP32)
#define DEBUG_SERIAL Serial
#define DEBUG_SERIAL_BAUDRATE 115200
#elif defined(ARDUINO_ARCH_STM32)
#include <HardwareSerial.h>
// RX TX
HardwareSerial Serial1(PA10, PA9);
//HardwareSerial Serial2(PA3, PA2); //这里串口2不需要定义
HardwareSerial Serial3(PB11, PB10);
#define DEBUG_SERIAL Serial1
#define DEBUG_SERIAL_BAUDRATE (uint32_t)115200
#endif
FSUS_Protocol protocol(BAUDRATE); //协议
FSUS_Servo uservo(SERVO_ID, &protocol); // 创建舵机
/* 等待并报告当前的角度*/
void waitAndReport(){
uservo.wait(); // 等待舵机旋转到目标角度
DEBUG_SERIAL.println("Real Angle = " + String(uservo.curRawAngle, 1) + " Target Angle = "+String(uservo.targetRawAngle, 1));
delay(2000); // 暂停2s
}
void setup(){
protocol.init(); // 通信协议初始化
uservo.init(); //舵机角度初始化
// 打印例程信息
DEBUG_SERIAL.begin(DEBUG_SERIAL_BAUDRATE); // 初始化软串口的波特率
DEBUG_SERIAL.println("Set Servo Angle");
}
void loop(){
float angle;
uservo.setRawAngle(0.0); // 设置舵机的角度
uservo.BeginAsync(); //开始异步指令
delay(1000);
uservo.setRawAngle(90.0); // 存入设置舵机角度
/*支持存入命令:
设置舵机原始角度
设置舵机的原始角度(指定周期)
设定舵机的原始角度(指定转速)
设定舵机的原始角度(多圈)
设定舵机的原始角度(多圈+指定周期)
设定舵机的原始角度(多圈+指定转速)
*/
delay(1000);
uservo.EndAsync(0); //结束异步,执行存入的指令
delay(1000);
uservo.BeginAsync(); //开始异步指令
delay(1000);
uservo.setRawAngle(180.0); // 存入设置舵机角度
delay(1000);
uservo.EndAsync(1); //结束异步,执行存入的指令
delay(1000);
}
19.数据监控¶
|
注意事项:
|
19.1. API¶
函数原型
输入参数
- <无>
返回参数
舵机的数据
19.2.示例源码¶
servo_monitor.ino
/*
* 舵机数据监控
* 提示: 拓展板上电之后, 记得按下Arduino的RESET按键
* --------------------------
* 作者: 深圳市华馨京科技有限公司
* 网站:https://fashionrobo.com/
* 更新时间: 2024/12/17
*/
#include "FashionStar_UartServoProtocol.h"
#include "FashionStar_UartServo.h" // Fashion Star总线伺服舵机的依赖
// 串口总线舵机配置参数
#define SERVO_ID 0 //舵机ID号
#define BAUDRATE 115200 // 波特率
// 调试串口的配置
#if defined(ARDUINO_AVR_UNO)
#include <SoftwareSerial.h>
#define SOFT_SERIAL_RX 6
#define SOFT_SERIAL_TX 7
SoftwareSerial softSerial(SOFT_SERIAL_RX, SOFT_SERIAL_TX); // 创建软串口
#define DEBUG_SERIAL softSerial
#define DEBUG_SERIAL_BAUDRATE 115200
#elif defined(ARDUINO_AVR_MEGA2560)
#define DEBUG_SERIAL Serial
#define DEBUG_SERIAL_BAUDRATE 115200
#elif defined(ARDUINO_ARCH_ESP32)
#define DEBUG_SERIAL Serial
#define DEBUG_SERIAL_BAUDRATE 115200
#elif defined(ARDUINO_ARCH_STM32)
#include <HardwareSerial.h>
// RX TX
HardwareSerial Serial1(PA10, PA9);
//HardwareSerial Serial2(PA3, PA2); //这里串口2不需要定义
HardwareSerial Serial3(PB11, PB10);
#define DEBUG_SERIAL Serial1
#define DEBUG_SERIAL_BAUDRATE (uint32_t)115200
#endif
FSUS_Protocol protocol(BAUDRATE); //协议
FSUS_Servo uservo(SERVO_ID, &protocol); // 创建舵机
uint16_t Voltage;
uint16_t Current;
uint16_t Power;
uint16_t Temperature;
uint8_t Status;
float Angle;
uint8_t Turns;
/* 等待并报告当前的角度*/
void waitAndReport(){
uservo.wait(); // 等待舵机旋转到目标角度
DEBUG_SERIAL.println("Real Angle = " + String(uservo.curRawAngle, 1) + " Target Angle = "+String(uservo.targetRawAngle, 1));
delay(2000); // 暂停2s
}
void setup(){
protocol.init(); // 通信协议初始化
uservo.init(); //舵机角度初始化
// 打印例程信息
DEBUG_SERIAL.begin(DEBUG_SERIAL_BAUDRATE); // 初始化软串口的波特率
DEBUG_SERIAL.println("Set Servo Angle");
}
void loop(){
ServoMonitorData data = uservo.ServoMonitor();
// 打印舵机监控数据
if (data.isValid) {
DEBUG_SERIAL.println("Servo Monitor Data (Valid):");
DEBUG_SERIAL.print("Servo ID: ");
DEBUG_SERIAL.println(data.servoId);
DEBUG_SERIAL.print("Voltage: ");
DEBUG_SERIAL.println(data.voltage);
DEBUG_SERIAL.print("Current: ");
DEBUG_SERIAL.println(data.current);
DEBUG_SERIAL.print("Power: ");
DEBUG_SERIAL.println(data.power);
DEBUG_SERIAL.print("Temperature: ");
DEBUG_SERIAL.println(data.temperature);
DEBUG_SERIAL.print("Status: ");
DEBUG_SERIAL.println(data.status);
DEBUG_SERIAL.print("Angle: ");
DEBUG_SERIAL.println(data.angle);
DEBUG_SERIAL.print("Turns: ");
DEBUG_SERIAL.println(data.turns);
delay(2000);
} else {
DEBUG_SERIAL.println("Failed to receive valid servo data.");
delay(2000);
}
}
日志输出
Servo Monitor Data (Valid):
Servo ID: 0
Voltage: 12051.00
Current: 30.00
Power: 361.00
Temperature: 2015.00
Status: 0
Angle: 4999.90
Turns: 13.00
20.控制模式停止指令¶
|
注意事项:
|
20.1. API¶
函数原型
void StopOnControlMode(uint8_t method, uint16_t power);// 控制模式停止指令
void StopOnControlUnloading();// 控制模式停止指令-卸力(失锁)
void StopOnControlKeep(uint16_t power); // 控制模式停止指令-锁力
void StopOnControlDammping(uint16_t power);// 控制模式停止指令-阻尼
输入参数
· method :停止指令执行方式
0x10-停止后卸力(失锁)
0x11-停止后保持锁力
0x12-停止后进入阻尼状态
· power :扭矩开关后功率
单位:mW,如果为 0 或大于功率保护值,则按功率保护值操作。
返回参数
- <无>
20.2.示例源码¶
servo_stop.ino
/*
* 设置舵机的角度(多圈)-停止
* 提示: 拓展板上电之后, 记得按下Arduino的RESET按键
* --------------------------
* 作者: 深圳市华馨京科技有限公司
* 网站:https://fashionrobo.com/
* 更新时间: 2024/12/17
*/
#include "FashionStar_UartServoProtocol.h"
#include "FashionStar_UartServo.h" // Fashion Star总线伺服舵机的依赖
// 串口总线舵机配置参数
#define SERVO_ID 1 //舵机ID号
#define BAUDRATE 115200 // 波特率
// 调试串口的配置
#if defined(ARDUINO_AVR_UNO)
#include <SoftwareSerial.h>
#define SOFT_SERIAL_RX 6
#define SOFT_SERIAL_TX 7
SoftwareSerial softSerial(SOFT_SERIAL_RX, SOFT_SERIAL_TX); // 创建软串口
#define DEBUG_SERIAL softSerial
#define DEBUG_SERIAL_BAUDRATE 115200
#elif defined(ARDUINO_AVR_MEGA2560)
#define DEBUG_SERIAL Serial
#define DEBUG_SERIAL_BAUDRATE 115200
#elif defined(ARDUINO_ARCH_ESP32)
#define DEBUG_SERIAL Serial
#define DEBUG_SERIAL_BAUDRATE 115200
#elif defined(ARDUINO_ARCH_STM32)
#include <HardwareSerial.h>
// RX TX
HardwareSerial Serial1(PA10, PA9);
//HardwareSerial Serial2(PA3, PA2); //这里串口2不需要定义
HardwareSerial Serial3(PB11, PB10);
#define DEBUG_SERIAL Serial1
#define DEBUG_SERIAL_BAUDRATE (uint32_t)115200
#endif
FSUS_Protocol protocol(BAUDRATE); //协议
FSUS_Servo uservo(SERVO_ID, &protocol); // 创建舵机
uint32_t interval; // 运行周期 单位ms
uint16_t t_acc; // 加速时间 单位ms
uint16_t t_dec; // 减速时间 单位ms
float velocity; // 目标转速 单位°/s
/* 等待并报告当前的角度*/
void waitAndReport(){
uservo.wait(); // 等待舵机旋转到目标角度
DEBUG_SERIAL.println("Real Angle = " + String(uservo.curRawAngle, 1) + " Target Angle = "+String(uservo.targetRawAngle, 1));
delay(2000); // 暂停2s
}
void setup(){
protocol.init(); // 通信协议初始化
uservo.init(); //舵机角度初始化
// 打印例程信息
DEBUG_SERIAL.begin(DEBUG_SERIAL_BAUDRATE); // 初始化软串口的波特率
DEBUG_SERIAL.println("Set Servo Angle");
}
void loop(){
DEBUG_SERIAL.println("Set Angle = 10000° ,StopOnControlUnloading\r\n");
interval = 500;
t_acc = 100;
t_dec = 100;
uservo.setRawAngleMTurnByInterval(10000, interval, t_acc, t_dec, 0);
delay(2000); // 暂停2s
uservo.StopOnControlUnloading();//停止失锁,可掰动
delay(5000);
DEBUG_SERIAL.println("Set Angle = -10000° ,StopOnControlKeep\r\n");
interval = 500;
t_acc = 100;
t_dec = 100;
uservo.setRawAngleMTurnByInterval(-10000, interval, t_acc, t_dec, 0);
delay(2000); // 暂停2s
uservo.StopOnControlKeep(100);//停止锁止,无法掰动
delay(5000);
DEBUG_SERIAL.println("Set Angle = 10000° ,StopOnControlKeep\r\n");
interval = 500;
t_acc = 100;
t_dec = 100;
uservo.setRawAngleMTurnByInterval(10000, interval, t_acc, t_dec, 0);
delay(2000); // 暂停2s
uservo.StopOnControlDammping(500);//停止阻尼,可掰动(有阻尼感)
delay(5000);
DEBUG_SERIAL.println("Set Angle = -10000° ,StopOnControlKeep\r\n");
interval = 500;
t_acc = 100;
t_dec = 100;
uservo.setRawAngleMTurnByInterval(-10000, interval, t_acc, t_dec, 0);
delay(6000); // 暂停2s
}
21.同步控制/同步数据监控¶
|
注意事项:
|
21.1. API¶
函数原型
void FSUS_Servo::SyncCommand(uint8_t servocount, uint8_t syncmode, FSUS_sync_servo servoSync[]); //同步控制
void FSUS_Servo::SyncMonitorCommand(uint8_t servocount, FSUS_sync_servo servoSync[],ServoMonitorData* data); // 同步数据监控
输入参数
- <无>
返回参数
舵机的数据
21.2.示例源码¶
servo_sync_command.ino
/*
* 同步控制/同步监控
* 提示: 拓展板上电之后, 记得按下Arduino的RESET按键
* --------------------------
* 作者: 深圳市华馨京科技有限公司
* 网站:https://fashionrobo.com/
* 更新时间: 2024/12/30
*/
#include "FashionStar_UartServoProtocol.h"
#include "FashionStar_UartServo.h" // Fashion Star总线伺服舵机的依赖
// 串口总线舵机配置参数
#define SERVO_ID 0 //舵机ID号
#define BAUDRATE 115200 // 波特率
// 调试串口的配置
#if defined(ARDUINO_AVR_UNO)
#include <SoftwareSerial.h>
#define SOFT_SERIAL_RX 6
#define SOFT_SERIAL_TX 7
SoftwareSerial softSerial(SOFT_SERIAL_RX, SOFT_SERIAL_TX); // 创建软串口
#define DEBUG_SERIAL softSerial
#define DEBUG_SERIAL_BAUDRATE 115200
#elif defined(ARDUINO_AVR_MEGA2560)
#define DEBUG_SERIAL Serial
#define DEBUG_SERIAL_BAUDRATE 115200
#elif defined(ARDUINO_ARCH_ESP32)
#define DEBUG_SERIAL Serial
#define DEBUG_SERIAL_BAUDRATE 115200
#elif defined(ARDUINO_ARCH_STM32)
#include <HardwareSerial.h>
// RX TX
HardwareSerial Serial1(PA10, PA9);
//HardwareSerial Serial2(PA3, PA2); //这里串口2不需要定义
HardwareSerial Serial3(PB11, PB10);
#define DEBUG_SERIAL Serial1
#define DEBUG_SERIAL_BAUDRATE (uint32_t)115200
#endif
FSUS_Protocol protocol(BAUDRATE); //协议
FSUS_Servo uservo(SERVO_ID, &protocol); // 创建舵机
FSUS_sync_servo servoSyncArray[18]; //
void setup(){
protocol.init(); // 通信协议初始化
uservo.init(); //舵机角度初始化
// 打印例程信息
DEBUG_SERIAL.begin(DEBUG_SERIAL_BAUDRATE); // 初始化软串口的波特率
}
int mode;
int count;
ServoMonitorData servodata[1];
void loop(){
mode = 1;
/* mode 1:单圈角度控制
mode 2:单圈角度模式-指定时间
mode 3:单圈角度模式-指定速度
mode 4:多圈角度模式
mode 5:多圈角度模式-指定时间
mode 5:多圈角度模式-指定速度
注意:Arduino UNO板子的RAM只有2k,目前只支持12个舵机同步
*/
count = 4;
for (int i = 0; i < count; i++) {
servoSyncArray[i].servoId = i;
servoSyncArray[i].angle = 90;
servoSyncArray[i].interval = 1000;
servoSyncArray[i].interval_multiturn = 1000;
servoSyncArray[i].velocity = 360;
servoSyncArray[i].t_acc = 100;
servoSyncArray[i].t_dec = 100;
servoSyncArray[i].power = 0;
}
uservo.SyncCommand(count,mode, servoSyncArray);
delay(2000);
uservo.SyncMonitorCommand(count, servoSyncArray,servodata);
delay(2000);
for (int i = 0; i < count; i++) {
DEBUG_SERIAL.println("id:"); // 打印每个 syncmonitorData
DEBUG_SERIAL.println(servodata[i].servoId);
DEBUG_SERIAL.println("voltage:"); // 打印每个 syncmonitorData
DEBUG_SERIAL.println(servodata[i].voltage);
DEBUG_SERIAL.println("current:"); // 打印每个 syncmonitorData
DEBUG_SERIAL.println(servodata[i].current);
DEBUG_SERIAL.println("power:"); // 打印每个 syncmonitorData
DEBUG_SERIAL.println(servodata[i].power);
DEBUG_SERIAL.println("temperature:"); // 打印每个 syncmonitorData
DEBUG_SERIAL.println(servodata[i].temperature);
DEBUG_SERIAL.println("status:"); // 打印每个 syncmonitorData
DEBUG_SERIAL.println(servodata[i].status);
DEBUG_SERIAL.println("angle:"); // 打印每个 syncmonitorData
DEBUG_SERIAL.println(servodata[i].angle);
DEBUG_SERIAL.println("turns:"); // 打印每个 syncmonitorData
DEBUG_SERIAL.println(servodata[i].turns);
delay(1000);
}
delay(2000);
mode = 1;
count = 4;
for (int i = 0; i < count; i++) {
servoSyncArray[i].servoId = i;
servoSyncArray[i].angle = 0;
servoSyncArray[i].interval = 1000;
servoSyncArray[i].interval_multiturn = 1000;
servoSyncArray[i].velocity = 360;
servoSyncArray[i].t_acc = 100;
servoSyncArray[i].t_dec = 100;
servoSyncArray[i].power = 0;
}
uservo.SyncCommand(count,mode, servoSyncArray);
delay(2000);
uservo.SyncMonitorCommand(count,servoSyncArray,servodata);
delay(2000);
for (int i = 0; i < count; i++) {
DEBUG_SERIAL.println("id:"); // 打印每个 syncmonitorData
DEBUG_SERIAL.println(servodata[i].servoId);
DEBUG_SERIAL.println("voltage:"); // 打印每个 syncmonitorData
DEBUG_SERIAL.println(servodata[i].voltage);
DEBUG_SERIAL.println("current:"); // 打印每个 syncmonitorData
DEBUG_SERIAL.println(servodata[i].current);
DEBUG_SERIAL.println("power:"); // 打印每个 syncmonitorData
DEBUG_SERIAL.println(servodata[i].power);
DEBUG_SERIAL.println("temperature:"); // 打印每个 syncmonitorData
DEBUG_SERIAL.println(servodata[i].temperature);
DEBUG_SERIAL.println("status:"); // 打印每个 syncmonitorData
DEBUG_SERIAL.println(servodata[i].status);
DEBUG_SERIAL.println("angle:"); // 打印每个 syncmonitorData
DEBUG_SERIAL.println(servodata[i].angle);
DEBUG_SERIAL.println("turns:"); // 打印每个 syncmonitorData
DEBUG_SERIAL.println(servodata[i].turns);
delay(1000);
}
delay(2000);
}
日志输出
id:
0
voltage:
11427.00
current:
30.00
power:
342.00
temperature:
2035.00
status:
0
angle:
0.10
turns:
0.00
id:
1
voltage:
11654.00
current:
30.00
power:
349.00
temperature:
2053.00
status:
0
angle:
0.10
turns:
0.00
id:
2
voltage:
11553.00
current:
30.00
power:
346.00
temperature:
2108.00
status:
0
angle:
0.10
turns:
0.00
id:
3
voltage:
11543.00
current:
30.00
power:
346.00
temperature:
2041.00
status:
0
angle:
0.10
turns:
0.00