快速入门¶
1.实例讲解¶
下述以本公司小8轴机器人产品进行编程实例讲解。
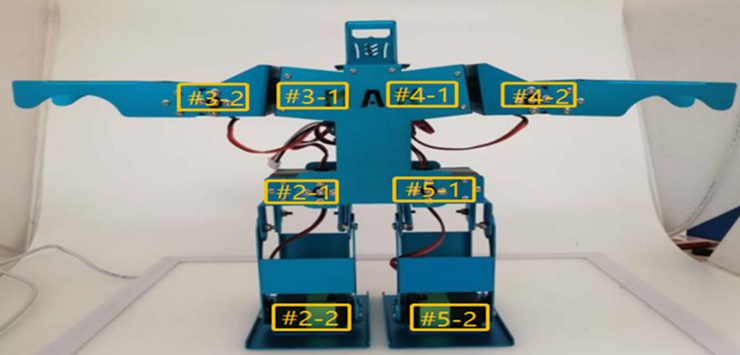
- 此款机器人采用了8颗型号为RA8-S22的DBSP舵机作为关节;舵机分别连接在控制板2、3、4、5舵机通道上。
- 右臂:#3-1和#3-2舵机
- 左臂:#4-2和#4-2舵机
- 右腿:#2-1和#2-2舵机
- 左腿:#5-1和#5-2舵机
1.1. 机器人与APP连接¶
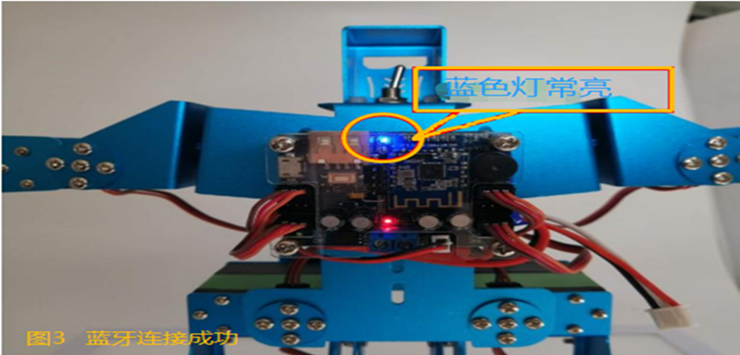
- APP 通过蓝牙与机器人通信。首先打开手机或平板蓝牙,进入 APP,打开机器人开关。
- 如图 1,APP 已搜索到机器人蓝牙装置,此时还未连接成功,机器人控制板蓝牙指示灯会一直闪烁。
- 点击侦察到的蓝牙装置,即可连接机器人蓝牙装置。如图 2,蓝牙设备蓝灯亮起,代表蓝牙连接成功,此时机器人控制板蓝牙指示灯长亮


1.2. 机器人动作编辑¶
1.2.1. 设计展示形状¶
1.扫描当前舵机
设计展示形状目的主要是将 APP 界面的图示舵机与机器人的舵机一一对应,方便使用者在动作编辑过程当中,实际舵机与界面图示舵机对应并可预览图示舵机的动作。如图4,进入【设计展示形状】页面,点击“扫描舵机”按钮,即可扫描到机器人身上8 颗舵机,以默认方式排布。图示舵机的颜色代表串列,如红色为第 2串列,黄色为第 3 串列。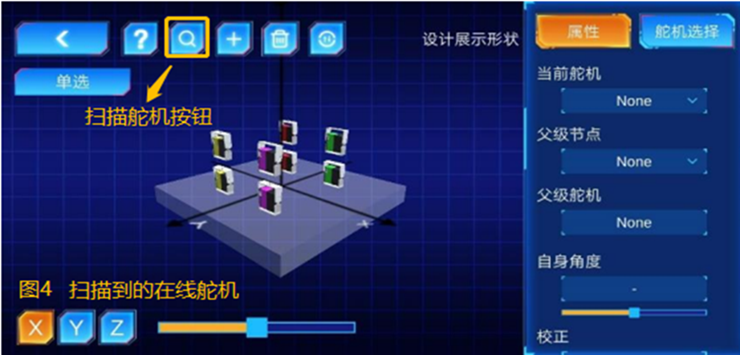
在这个页面,通过设置各个舵机的父级节点及拖动各个舵机的位置来设计展示形状,使之与机器人相对应。
- 父级节点:相当于实际舵机的物理连接。例如,实际舵机#-2 通过支架连接于#-1,我们则设置#2-2 舵机的父级节点为#2-1,设置正确的父级节点,才能使界面图示舵机运动正确反映实际机器人的运动。
- 在这些操作中,经常需要放大底板和舵机,拖动底板和舵机。其方法为:一指可旋转图示舵机;二指放大缩小(两个手指点住界面可以放大和缩小舵机);三指拖动(三个手指点住界面拖动可以拖动舵机);三指双击回归初始位(三个手指双击界面即可使底盘和舵机回到初始位置)。
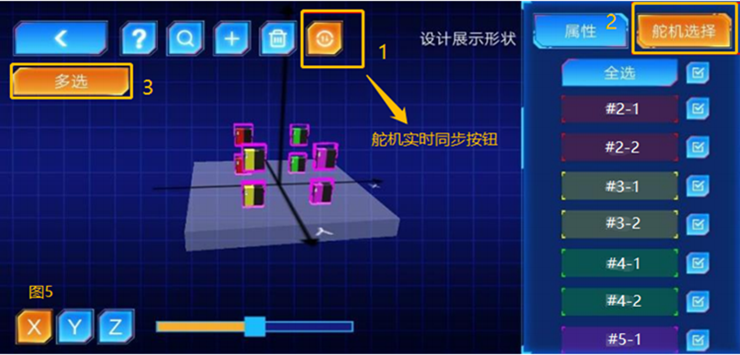
- 摆形状之前建议让所有舵机运动到 0 度位置。如图 5,打开“舵机实时同步”按钮,点击“舵机选择”,全选舵机。(同步的意思为实际舵机会运转到与图示舵机角度一致的位置。所以在打开同步按钮时,一定要先进行扫描操作,使图示舵机角度与实际舵机角度一致,避免舵机突然大范围运转引起安全事故。后续的打开同步都应先进行扫描)
2.设置所有舵机运动至0点位置,点击“属性”,在“自身角度”输入 0,点击确定,即所有舵机到达 0 度,如下图: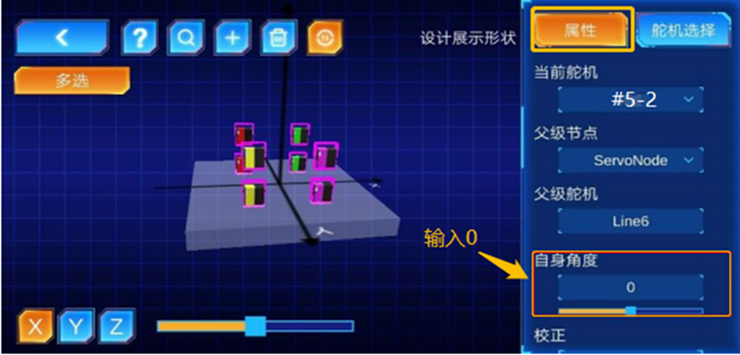
3.设置父级舵机
现在来摆机器人的手的位置,先确定机器人的右手为#3-1 和#3-2 舵机且#3-2 舵机连接于#3-1 舵机。如图 7,首先选中#3-2 舵机,设置#3-2 舵机父级节点为#3-1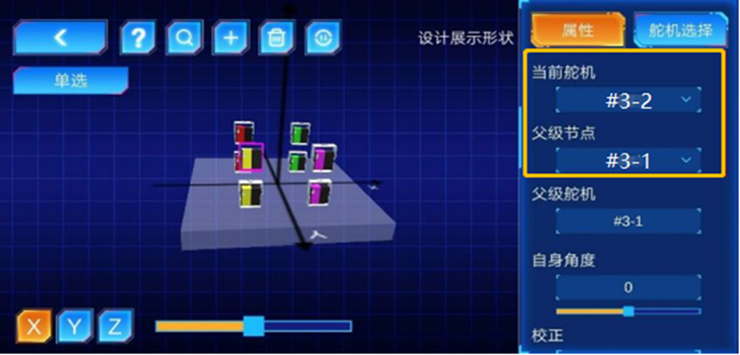
4.拖动舵机位置
选择#3-1 舵机,通过调节“相对位置”和“相对旋转”来拖动#3-1 舵机的位置,建议以输入数字形式来摆舵机的位置,可以让舵机摆的更加对称来对应实际机器人。因为设置了父级节点,#3-2 会随着#3-1 拖动。#3-1 和#3-2 舵机摆到了界面右上部代表机器人右手。如下图:
5.单独旋转#3-1舵机
参照机器人的组装,发现#3-1 舵机还要进行旋转,而#3-2 舵机位置已确定无需拖动旋转,这时应选择#3-2 舵机,取消其父级节点#3-1,设为 ServoNode,再来单独旋转#3-1 舵机。确定位置之后,最后将#3-2 舵机父级节点设为#3-1,最终确定机器人右手位置。如下图:
6.摆好所有舵机位置
参照机器人的组装,摆好所有图示舵机的位置,如图 10,图示舵机可以来反映机器人的左右手和左右脚,且舵机运动时也可反映机器人的运动。如下图: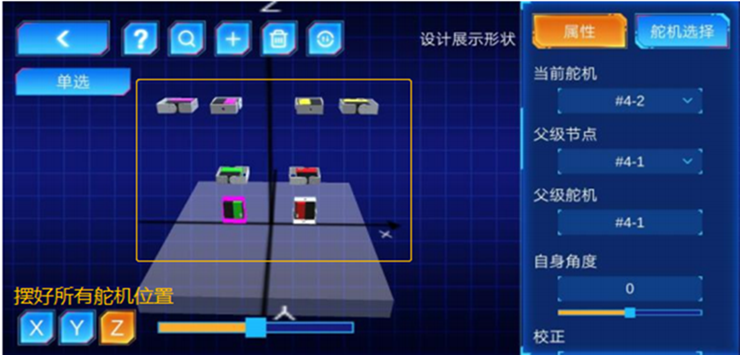
7.设置舵机速度
在【设计展示形状】页面,可以设置舵机速度,此舵机速度表示:输入角度数值,让舵机运转到该角度的速度。默认为 500。如下图:
1.3. 编辑巨集¶
1.3.1. 新增动作¶
设计好展示形状之后,开始编辑巨集。巨集意为动作组的集合,通过添加动作、延时、子巨集构成巨集。进入【专案】页面,新建巨集,进入【巨集】页面进行编辑巨集,如下图:

需要注意的是:新增的动作就是将【巨集】页面的各个图示舵机角度记录到动作中。通过调整图示舵机角度来新增动作,或者新增完一系列动作之后再对每个动作进行调整更新。如图 12,点击右下角“添加”按钮,进入【新增】页面,如下图,可新增动作、延时、子巨集。选择“新增动作”,新增的动作会有默认“动作名称”和默认“所用时长”,用户可自行修改。点击右上角“确定”按钮,即新增动作成功。

如下图,左下角“动作 1”已添加到巨集栏内,右面显示动作内容。照上述方法,可添加多个动作、延时。

*前面提及新增动作的内容即为界面中各个图示舵机的角度,现在详细说明如何添加所需要的动作。*
调整图示舵机角度来新增动作,步骤如下:
① 通过手动摆好机器人动作后,点击“扫描”按钮,如下图 ,图示舵机角度与机器人舵机角度一致,此时再新增一个动作即可。
② 选择舵机,在界面右侧调整舵机角度。在调整舵机角度前,若是打开“实时同步”按钮,则实际舵机角度会随之变化。调整好舵机角度之后,新增动作即可。在此过程当中,舵机运动之后或者选择舵机将“锁定”置于“ON”都会使实际舵机处于锁力状态,舵机有锁力会使机器人保持动作。当需要解锁舵机时,请将“实时同步”关闭,或者选择舵机将“锁定”置于“OFF”。

③ 更新动作,如下图,选择“动作 3”,在界面可以看到动作 3 中各个舵机的角度,应用上述调整图示舵机角度的方法调整好角度之后,点击“更新此动作”按钮即可。

1.3.2. 新增子巨集¶
编辑巨集时,可添加子巨集,如下图 ,添加子巨集并设置子巨集的循环次数。添加子巨集主要目的让动作组循环。
注意:巨集只能嵌套一层巨集,即子巨集不得再包含子巨集,所以已经嵌套了子巨集的巨集不会显示在“子巨集”栏供选择。

1.3.3. 执行巨集¶
1.编辑好巨集之后,可在线执行巨集以检验巨集。如,打开“实时同步”按钮,再点击左下角“播放巨集元素”按钮,就可看到机器人与界面图示舵机同时按照巨集内容运动。如下图:
2.也可以在【专案图】页面,点击相应巨集的右下角眼睛,预览机器人执行巨集动作。如下图:

1.4. 编辑摇杆¶
- 编辑好巨集之后,再将巨集映射在摇杆按钮上,即可使用 APP 摇杆操控。
进入【专案】页面的【摇杆】页面,这里使用默认摇杆进行编辑。如下图:

- 在编辑模式下,点击要编辑的按钮,就会弹出编辑窗口,如下图:

- 先选择按钮的控制模式:中断与不中断。中断表示后令压前令,比如:触发长按动作时会覆盖按下的动作直接执行长按动作;不中断则意味着各指令按顺序进行。
- 再选择按按钮的方式:按下、长按、放手。
- 最后选择巨集,按确定按钮即可。
1.5. 专案导出到主板¶
通过上述一系列编辑,基本上就完成了编辑专案的过程,最后在【专案】页面,点击“导出到主板”,即可将专案下载到控制板,弹出专案导出到主板成功的提示,如下图:

1.6. 手柄操控机器人¶
上述操作完成后,在专案的【摇杆】页面操控机器人,如下图 ,打开“操作模式”按钮,即可使用摇杆控制机器人。

1.7. 载入专案¶
上述是编辑新建的专案,同样也可以载入专案进行编辑。载入专案有两种途径:
- 从控制板载入专案到 APP。
- 专案文件用 APP 打开。
1.7.1. 从控制板载入专案到APP¶
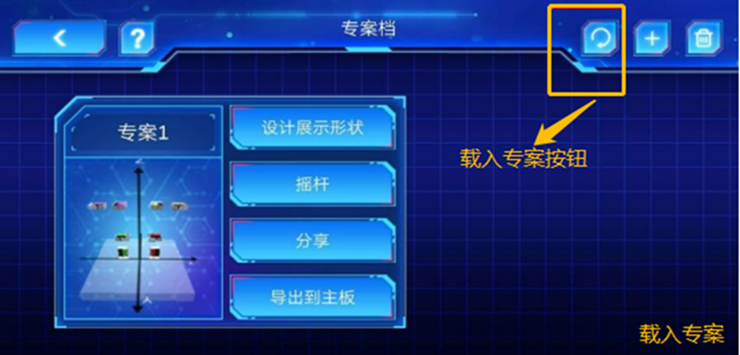
- 如下图 ,在【专案】页面点击右上角“载入专案”按钮。
- 若 APP 已有与控制板专案 ID 一样的专案,则会弹出“是否覆盖相同编号的专 案”视窗。选择“是”,则会覆盖;选择“否”,则会载入新建专案。 如下图:

- 这里选择“否”,载入专案成功之后,则会弹出“载入专案成功”,如下图1。点击“确 定”按钮即可。如下图2,可看到专案 2 是从控制板载入的专案。


1.7.2. 专案文件载入到 APP¶
- 在手机文件夹里面找到专案文件的位置。如下图,在手机上找到后缀名为.svproj 专案文件。

- 长按点击“分享”。这时会弹出分享视窗,选择“ROBO Servo”APP。如下图:
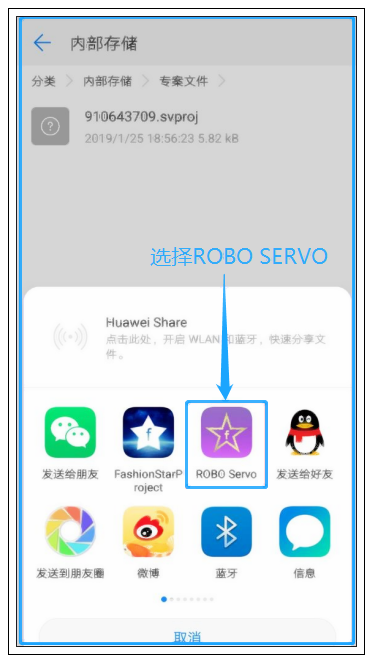
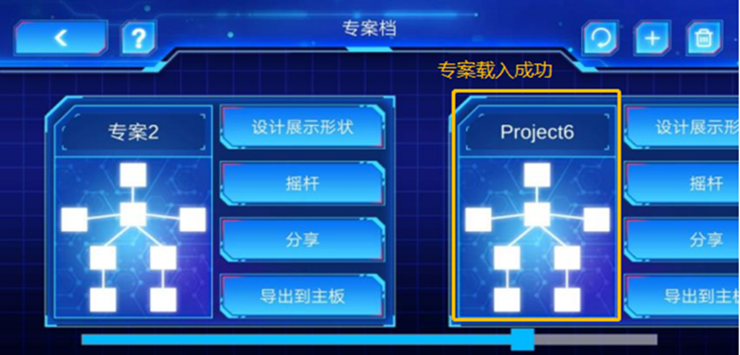
- 选择“ROBO Servo”APP后,会自动进入 APP,并弹出“选择需要覆盖的专案”视窗,如下图:

- 这里选择“新建”,点击“确定”。如下图,成功载入了“Project6”专案。
*注意:部分型号手机可能会出现使用分享功能时会自动退出 APP,或者只有退出 APP之后,才能将专案文件分享到 APP。*