设备简介¶
1. 机械臂简介¶
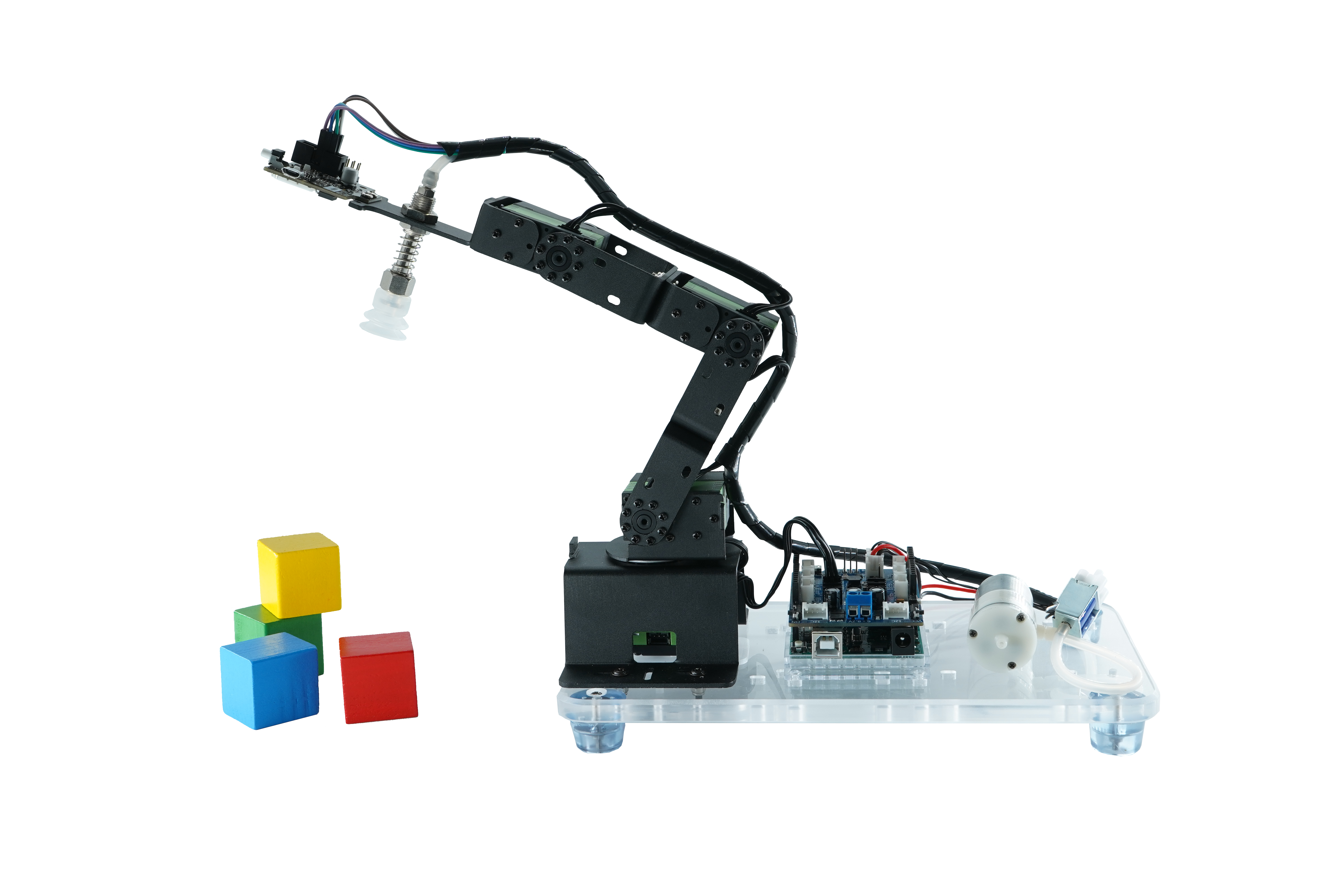
四自由度机械臂被广泛应用于高校教学领域、个人DIY制作以及创客教育之中,可以把它看作是一个简单的多自由度演示平台,它的动力系统是由4个25KG 的UART舵机组成,可以实现机械手的前后、上下及左右抓取搬运。舵机均标配总线伺服舵机,使输岀更加稳定。
2. 设备信息¶
2.1 设备外观¶
2.2 产品特点¶
- 自动颜色识别和吸取
- 手臂运动轨迹算法
- 内建气泵管理线路
- 舵机功率控制
- 4自由度机械臂结构
2.3 配置清单¶
2.3.1 总线伺服舵机*4¶
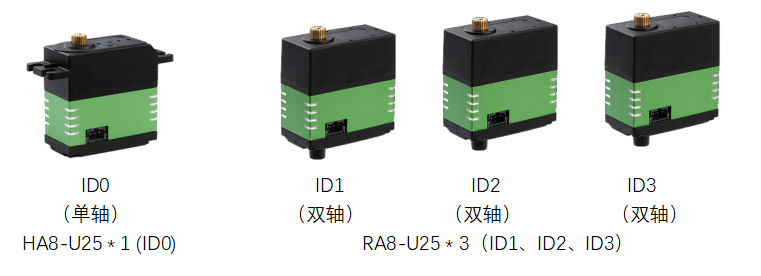
出厂默认连接方式:
ID0、ID1、ID2和ID3舵机串联连接,ID0舵机另外一端口通过舵机线连接在Ardurobo2主板的CH1舵机通道上;
UART舵机也是总线伺服舵机的一种,也可以接到Ardurobo2主板上的其他舵机通道,如CH2、CH3、CH4、CH5。
注:由下到上舵机id分别增加
2.3.2 Arduino UNO主板¶
Arduino能通过各种各样的传感器来感知环境,通过控制灯光、马达和其他的装置来反馈、影响环境。板子上的微控制器可以通过Arduino的编程语言来编写程序,编译成二进制文件,烧录进微控制器。

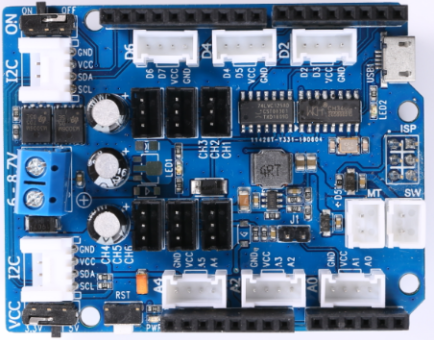
2.3.3 Ardurobo2主板¶
 ¶
¶
①扩展兼容Arduino UNO ②六组总线伺服舵机接口
③扩展两组Grove I2C ④扩展三组Grove模拟接口
⑤扩展三组Grove数字接口 ⑥一组ISP接口,一组电子阀门,一组气泵接口
2.3.4 Pixy II视觉识别模块¶
Pixy是一款在全球极受欢迎的开源视觉传感器(图像识别传感器),Pixy II是该系列的第二代版本。它能够让图像识别变得更容易,支持多物体识别,具有强大的多色彩颜色识别及色块追踪能力(最高支持7种颜色),就像它的前身一样,Pixy II只需按下一个按钮即可识别并记忆你教授的物体。同时,新版本增加线路追踪和小型条形码识别功能,较上一版本的Pixy反应更快,体型更小,功能更强。

2.3.5 气泵、电池、其他配件¶
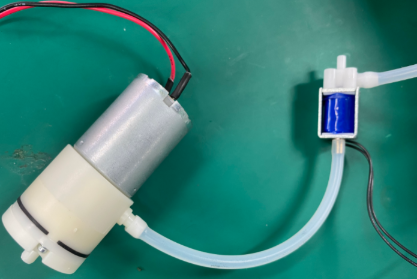
气管请参考上图的连接方式连接,气泵马达连接至Ardurobo2的MT口,电磁阀连接至Ardurobo2的SW口。
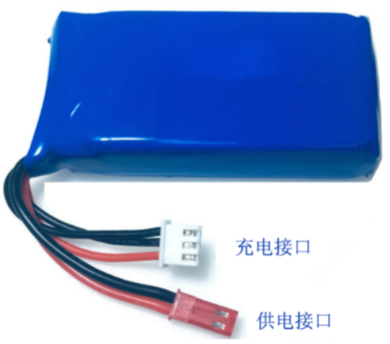
充电接口:连接至充电器充电
供电接口:连接至手臂给手臂供电
- 其他配件:手臂支架,外壳套件及相关连接线