快速入门¶
1. 机器人与电脑连接¶
1.1. 连接顺序¶
- 打开机器人电源控制板开关,机器人通电(电源控制板红色指示灯会常亮)
- 将Micro USB 数据线连接机器人与电脑
- 双击鼠标打开电脑上的机器人动作编辑软件 Develop.exe
*注意:机器人连接顺序请按上述1-2-3步骤来连接,否则无法扫描出舵机。*
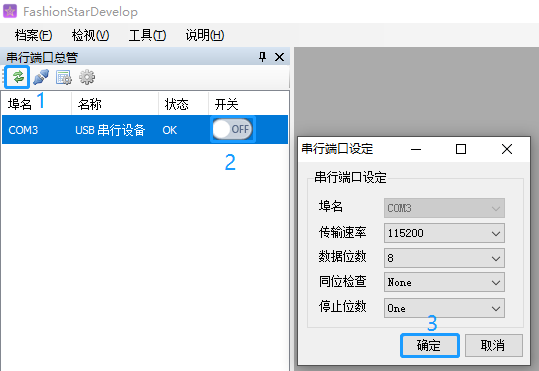
1.2. 串口设置¶
点击刷新串口1,会出现COM口,选中"USB串行设备",点击开关OFF,确认串口设置,点击确定,如下图:
1.3. 扫描舵机¶
下述以15自由度格斗机器人为例进行说明,
选择【舵机】页面,点击扫描舵机键,会在下方栏位和右侧栏位扫描出机器人上的所有舵机,如下图:
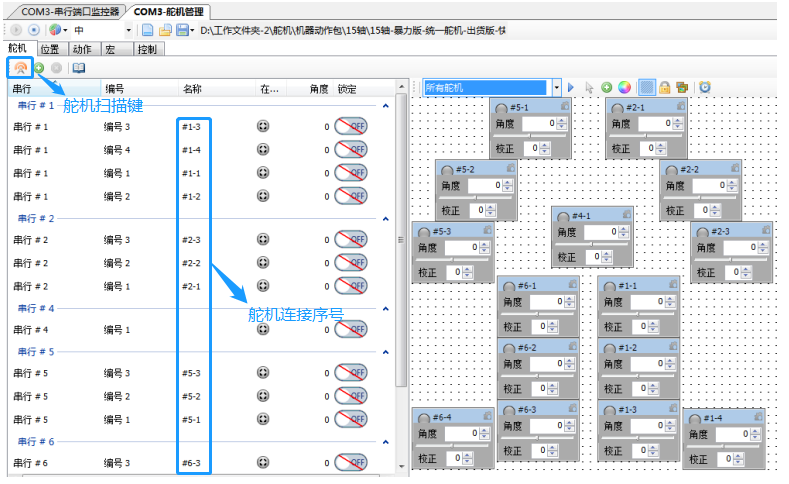 舵机连接序号对应机器人的各个关节部位。
舵机连接序号对应机器人的各个关节部位。
1.4. 创建一个新动作¶
- 点击扫描键,扫描出所有舵机后,此时可以手动对机器人摆出所需动作的姿势。
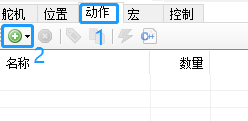
- 例如我们摆一个机器人抬起右手的姿势,摆好动作后,点击【动作】中“以测量增加动作”将该动作添加进来,如右图所示:
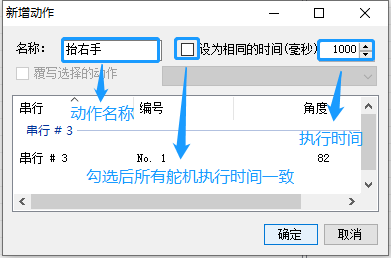
- 跳出弹窗可以修改动作名称和动作的执行时间,如下图:
- 反复操作,可以将所需要的动作全部扫描添加进来,例如:
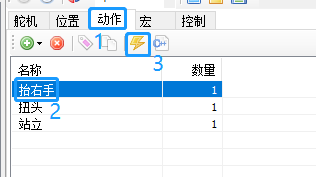
- 为了验证刚才设置的动作是否正确,可选定某个动作,如选定抬右手动作,点击上图“小闪电”【到此位置】按钮3,便会执行抬手的动作。
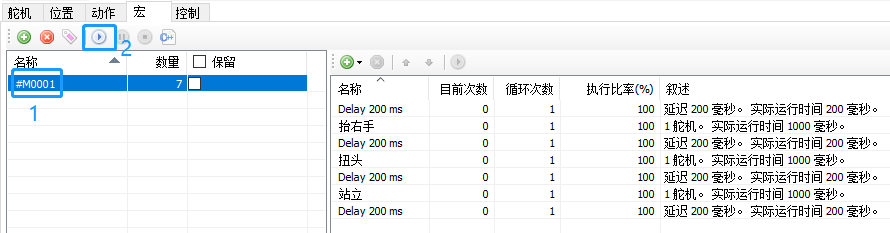
1.5. 创建一个动作组(宏)¶
- 动作添加完成后,点击【宏】,新增宏,进行动作组合编辑,选中#M0001(双击可更改名称),再点击右边的+,如右图:
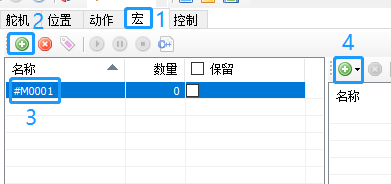
- 在弹出的对话框中有“新增动作命令”,“新增巨集命令”,“新增延迟命令”三个选项,
- 选择【新增动作命令】和在弹出的对话框中选择之前扫描添加好的动作,如下图:
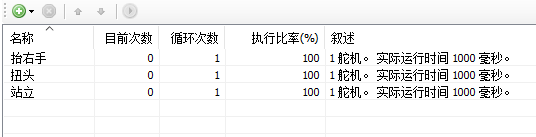
- 可根据需要是否在动作与动作之间添加延时,完成系列动作添加后,如下图所示:
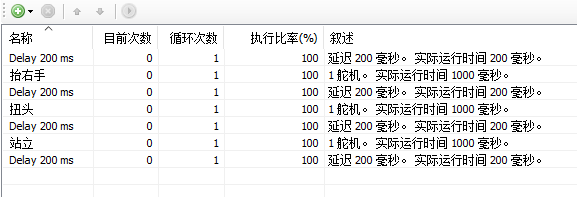
- 动作组(宏)设置好后选择“执行宏”,进行动作在线运行,观察动作组中的某个动作执行是否到位。
1.6. 手柄按钮映射¶
- 动作组(宏)在线执行没有问题后,将动作组(宏)映射到PS2手柄对应按键上,点击【控制】目录下的+号,如下图:
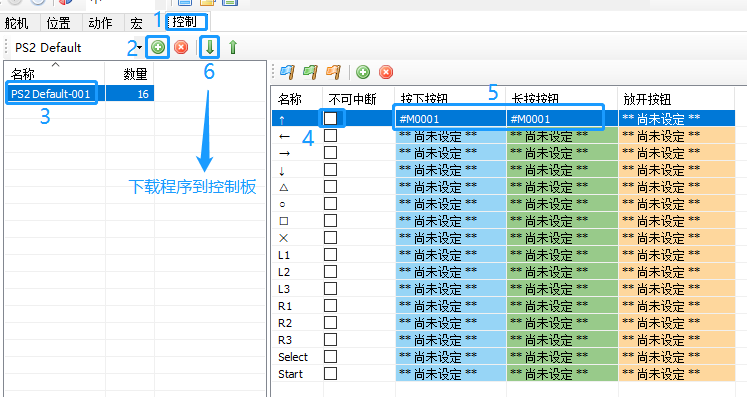
- 在右边的编辑窗口中会出现三种按钮状态,分别是 “按下按钮”,“长按按钮”,“放开按钮”,每个状态可以添加一个动作组(宏),将之前的宏添加到相应的按键指令中,如上图,设置一个向上的箭头并且设置【按下按钮】和【长安按钮】来执行宏#M0001。同理,也可以设置其他的按钮来实现手柄操作。
- 图中【不可中断】定义:勾选则表示前一个动作组(宏)执行完后,才会执行另外的动作组(宏),即如果同时按两个按钮,先按的按钮动作执行完后,才会执行后按的按钮的动作组;(即不得后令压前令);不勾选,则各动作执行遵照后令压前令的规则。
- 设置完成后点击“下载到控制板”,此时动作组程序就下载到了控制板中。
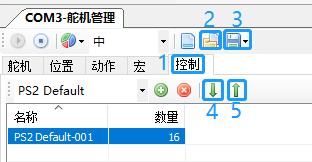
2. 程序的保存和下载¶
2.1. 备份机器人已有程序¶
- 选择1【控制】页面。
- 点击5【上传专案箭头】,此时会读出机器人控制板中已有的程序PS2 Default-00。
- 出现弹窗时,选择【否】。
- 再点击【保存按钮3】自定义一个名字保存即可,如:出厂设计。
2.2. 保存当前设计的程序¶
- 选择1【控制】页面。
- 点击3【保存按钮】,自定义一个名字保存,例如:我的设计。
2.3. 下载当前设计的程序¶
- 点击2【打开专案按钮】。
- 找到第一步保存的程序,点击打开。
- 然后点击4【下载按钮】程序便下载到控制板上。
3. 手柄操控说明¶
3.1. 机器人与手柄连接¶
程序下载到控制板后,执行以下操作:
- 关闭机器人电源,拔除连接电脑的Micro USB线,同时将USB接收器接到控制板上。
- 打开遥控器电池后盖,装上两节7号电池。
- 打开机器人电源开关和手柄电源开关,机器人将与手柄自动连接,待手柄绿色指示灯RX由闪烁变为常亮,表示手柄连接成功,此时可以手柄操控机器人。
- 如果自动连接失败,请按下手柄上的模拟按钮,待手柄绿色指示灯RX由闪烁变为常亮,表示手柄连接成功。
PS2手柄如下图所示:
