高阶操作¶
1.舵机的锁定和卸力¶
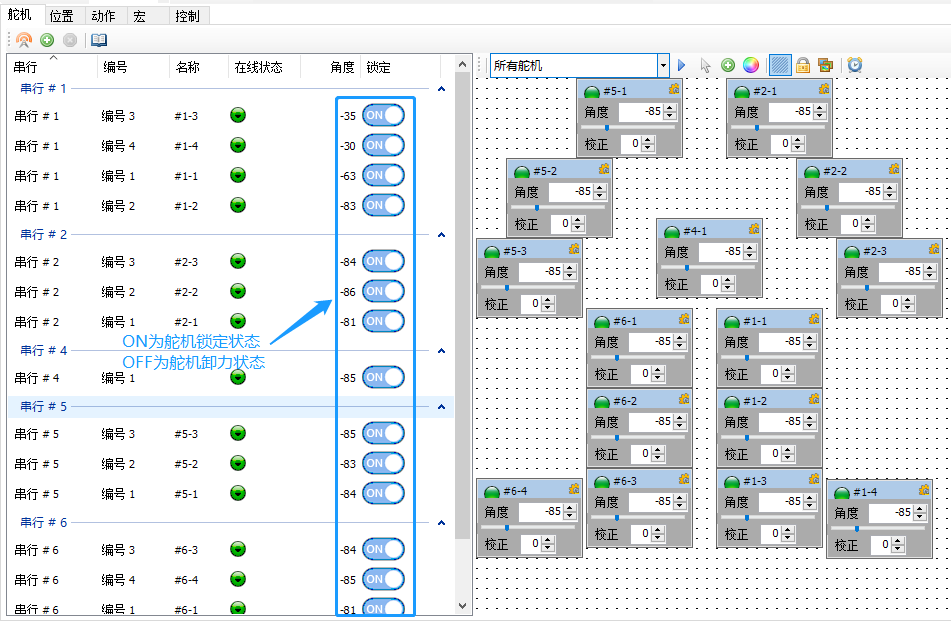
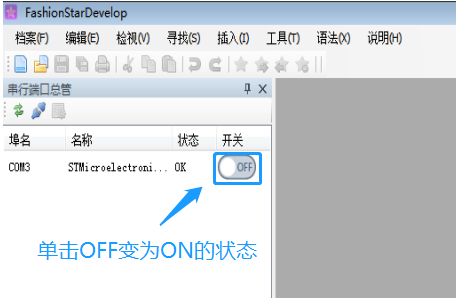
机器人在上电运行时舵机是处于锁定的状态,可通过动作编辑器单独对某颗舵机或者全部舵机进行锁定和卸力,以方便对机器人动作的调整。ON为舵机处于锁定的状态,OFF为舵机卸力状态,点击ON按钮可进行锁定和卸力切换,如下图:
2.舵机图示位置摆放¶
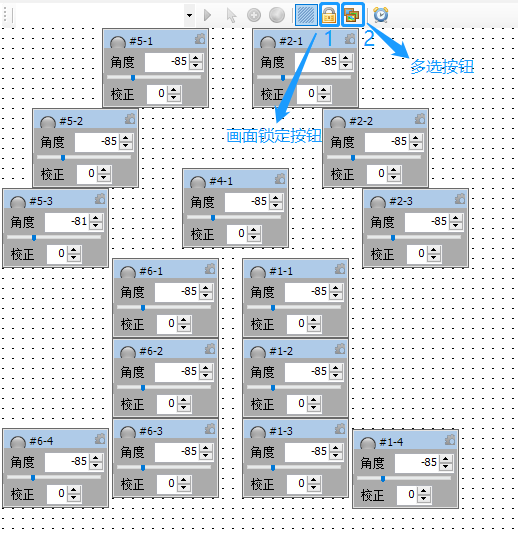
- 选定某颗舵机图形,可对其进行拖动摆放,或者点击上图的【多选按钮】,可对多个舵机进行同时拖动。可摆放成机器人的样子,这样可以更加直观的对机器人各关节舵机进行调整和动作反馈。摆放图形时,注意机器人舵机的物理位置要对应。
- 点击“小锁头”按钮,会锁定舵机画面,此时舵机图示不可拖动。如下图:
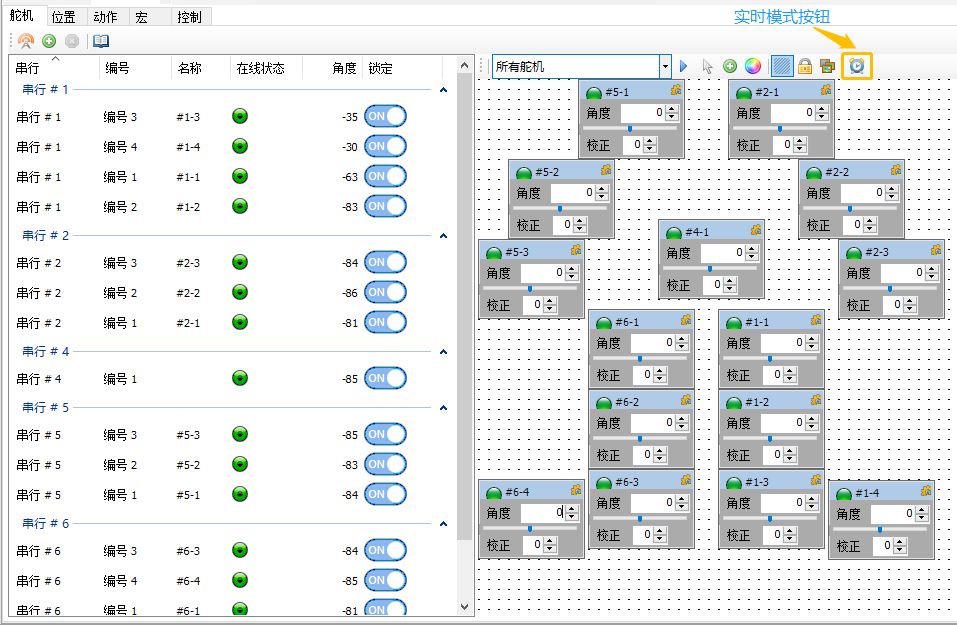
3.实时模式¶
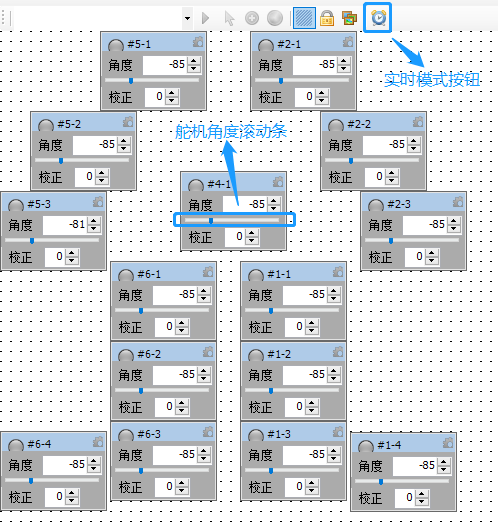
当舵机处于在线状态时,点击“小闹钟”【实时模式按钮】,鼠标拖动角度控制滚动条,可对舵机进行实时角度控制(有效角度为-95°~95°)。只有在打开实时模式的情况下,物理位置的舵机角度才会实时反馈。如下图:
4. 设置动作循环¶
4.1. 设置步骤¶
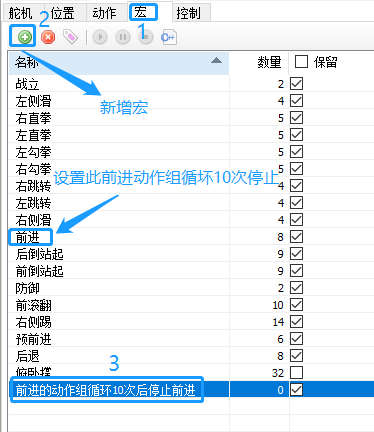
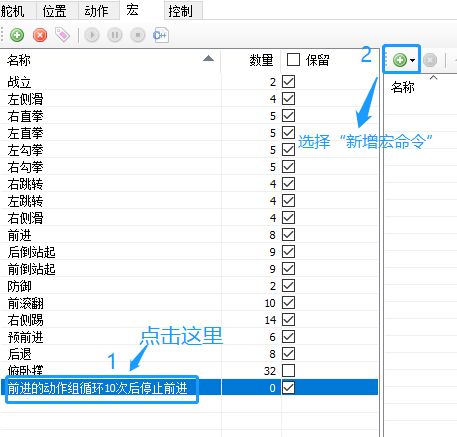
- 确保机器人处于在线状态,并且机器人已经设置了一个以上的动作组(宏)数量,例如我们设置机器人前进的动作走10遍后停止。如下图,新建一个宏,双击修改为“前进循环10次后停止”。
- 新增宏“前进循环10次后停止”后,点击1,然后点击2【新增宏命令】,如下图:
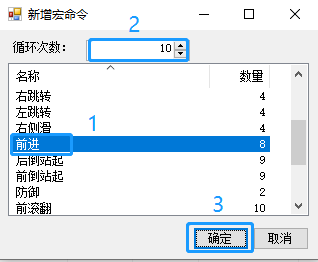
- 跳出弹窗,下拉并选择【前进】,修改循环次数为10次,点击确定,如下图:
- 选择1,然后执行宏,观察次数,循环10次后停止。如下图:
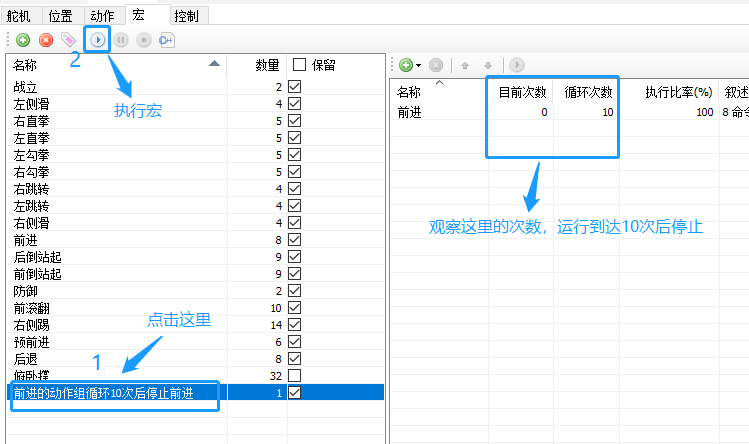
此时,设置动作循环完成。
5. 微调某颗舵机的角度¶
下述以15自由度格斗机器人来进行举例说明。例如,操作机器人时,发现机器人站立的时候腰部侧转了一定的角度,这个时候需要对其进行微调,我们要微调编号为#4-1的舵机角度。
5.1. 微调步骤¶
- 打开格斗机器人电源开关,机器人通电(电源红色指示灯会常亮)。
- 将Micro USB 数据线连接机器人与电脑。
- 打开电脑上的机器人动作编辑软件Develop.exe。
- 扫描舵机,确保所有舵机全部处于在线状态。
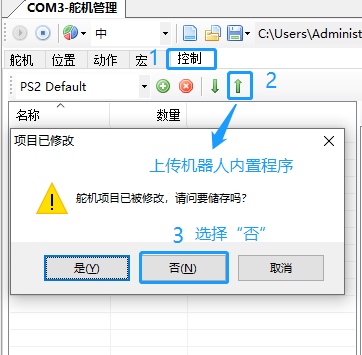
- 点击【控制】页面,点击向上的箭头“上载机器人内置程序”,跳出弹窗时选择【否】,如下图:
- 上载成功会弹窗,如下图所示:
- 返回到【舵机】页面,确保实时模式处于解除状态。
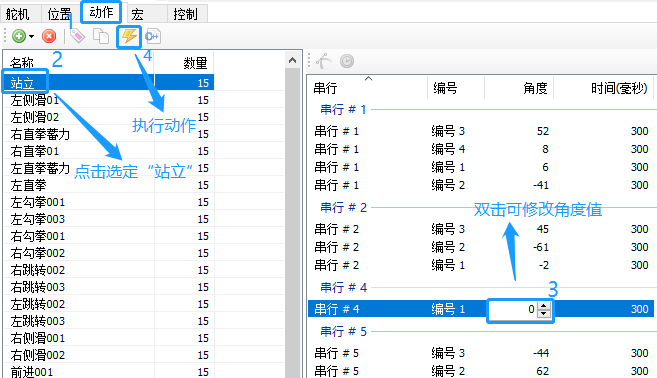
- 选择【动作】页面,选择“站立”动作,双击微调角度大小(建议上下2度调节),然后点击执行按钮4,同时确认机器人腰部是否回正,如下图:
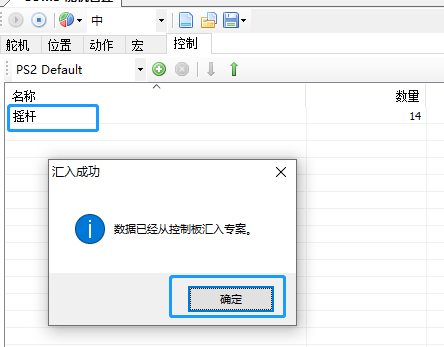
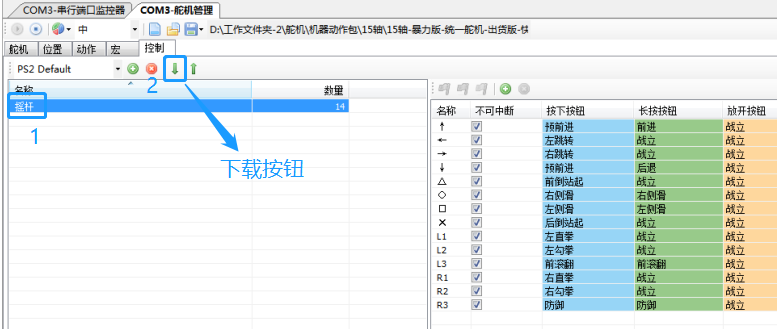
- 如果机器人#4-1舵机通过微调,腰部回正后,再把修改后的角度重新下载到控制板上,即可完成角度微调,下载方法:选择【控制】页面,选择“摇杆”,点击下载按钮3,如下图:

- 弹出【汇出成功】窗口,表示微调后的角度已经下载到了控制板,如下图:
6. 机器人零点设置¶
下述以15自由度格斗机器人零点调整进行说明。
零点状态
零点状态即为机器人双腿伸直,双臂水平打开,身体处于中立位时的状态,理想状态下的舵机角度均为0°,如果此状态舵机角度不是0°,那么需要我们进行零点位置的调整。
6.1. 零点设置步骤¶
基本步骤分为六步:
- 打开动作编辑器软件
- 导入机器人原始动作
- 运行机器人原始0位动作
- 0位动作校准
- 校准后的动作下载到控制板
- 另存动作包
具体操作如下:
6.1.1. 打开动作编辑器软件¶
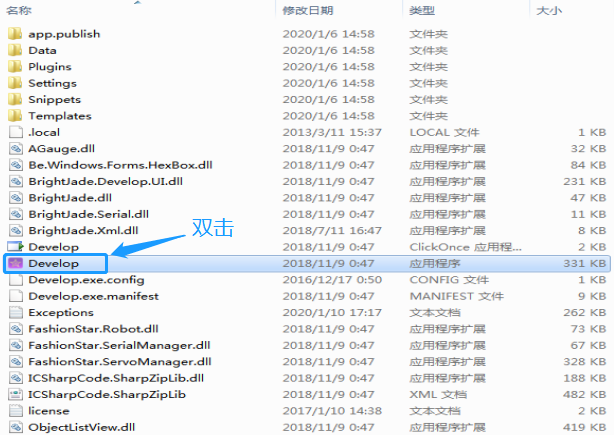
- 机器人上电后,USB线连接机器人和电脑,打开机器人动作调式软件,双击Develop,如下图:
- 动作调式软件打开后,单击“开关”,如下图:
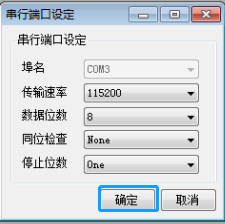
- 弹出如下窗口,直接点击确定,如下图:
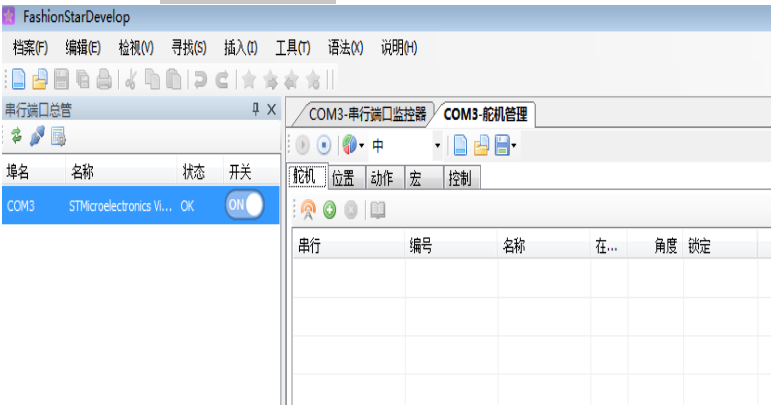
- 然后跳出弹出,表示动作调式软件成功打开了,如下图:
6.1.2. 导入机器人原始动作¶
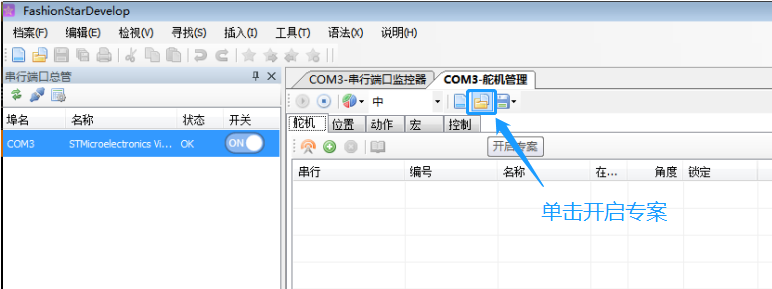
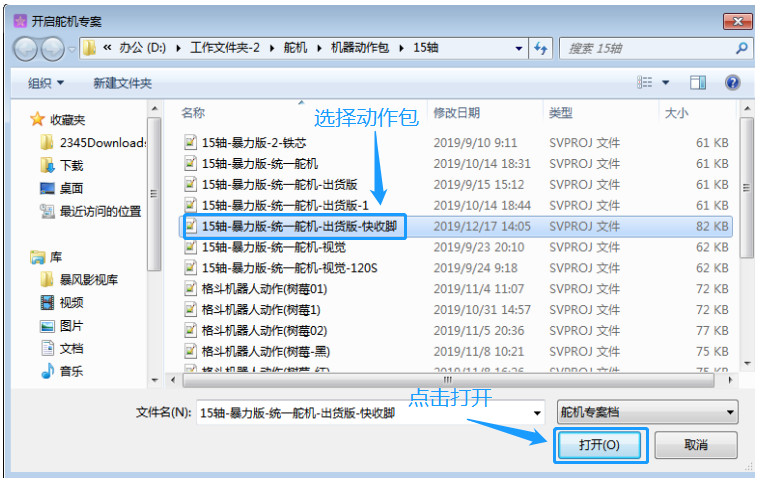
- 点击“开启专案”,如下图:
- 找到并选中要打开的动作包文件,如下图:
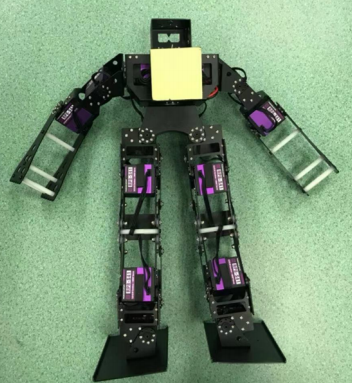
- 动作包打开后,需特别注意,机器人要平躺在足够大的桌面或地板上,双手和双脚都要伸直,预防下一步运行动作时,舵机被卡到或舵机堵转。机器人平躺在地面,如下图:
6.1.3. 运行机器人原始0位动作¶
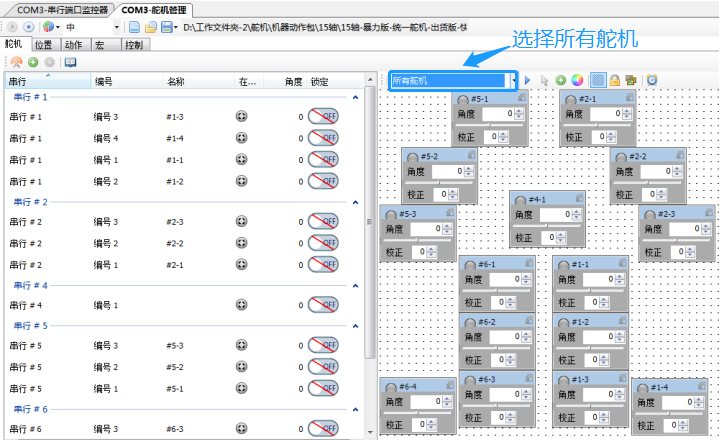
- 点击选取范围符号,选择【所有舵机】,如下图:
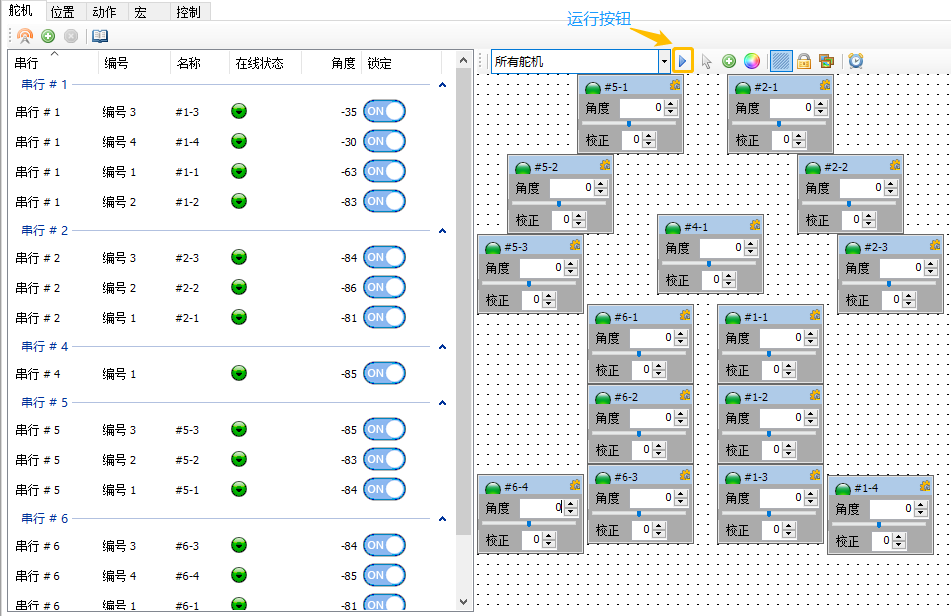
- 点击【运行】按钮,如下图:
6.1.4. 0位动作校准¶
把机器人放站立状态。用手拿机器人垂直离桌面,要求机器人两手和两脚是直线状态,即“T”字状。
- 两手:正面和从上往下看都是一条直线。
- 两脚:正面看是两条平行线,侧面看是一条直线。
- 两个脚底板:着地面成平行,前面和后面对齐。
*由于产品部品的轻微差异,机器人装好后,实际的“0”位和理想的“0”会有一定的差异,所有需要对舵机的实际“0”进行微调,最终达到上述的3点要求,首先要清楚机器人身上每一个舵机对应 动作调式软件上的哪一个舵机*。
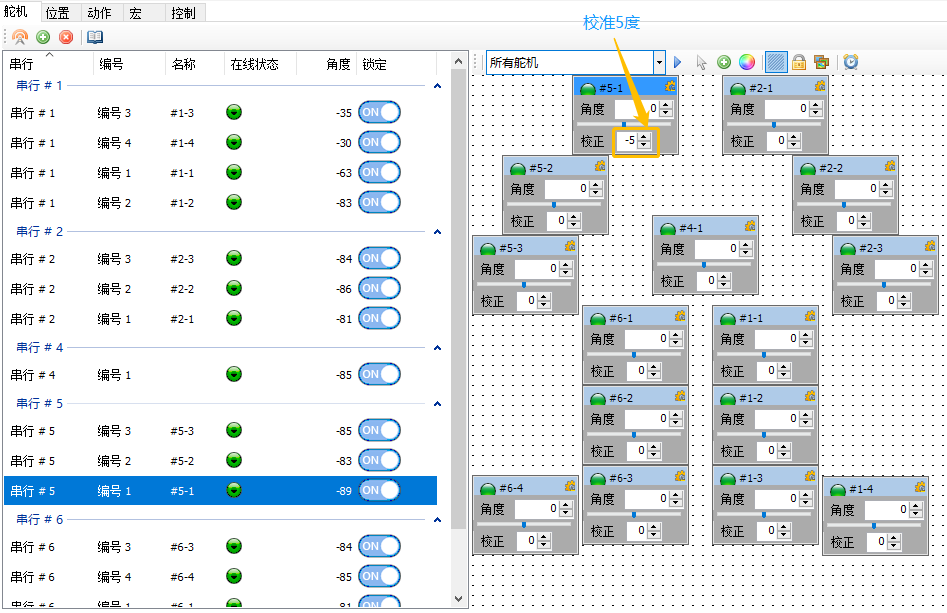
以如下这台机器人右手一级舵机(#5-1)偏差5度为例,微调方法如下:
- 在运行所有舵机“0”度动作后,点击“小闹钟”进入实时模式,如下图:
- 点击#5-1舵机符号的角度键,此时加1°,机器人上的右手一级舵机跟着1度的转动,当加到5°时,,机器人上的右手一级舵机角度就摆到了理想的角度。如下图:

- 校正机器人上的右手一级舵机角度,点击动作调式软件上#5-1舵机上的校正键,让#5-1的角度键为0度,校准完成。如下图所示:
同理,腿部舵机的调试,通常是从一级舵机到四级舵机,逐一进行微调,先把左脚调好后再调右脚,以左脚为基准。
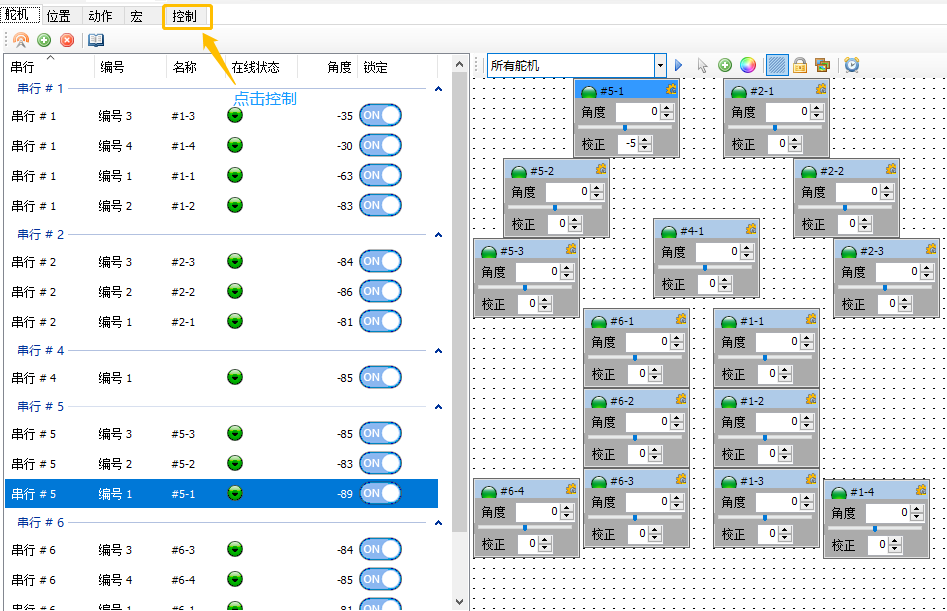
6.1.5. 校准后的动作下载到控制板¶
- 当把所有的舵机角度都微调且校准好后,把参数下载到主板。点击控制键, 如下图:
- 选择摇杆,点击下载键,如下图:
- 下载完成后点击“确定”,如下图:

6.1.6. 另存动作包¶
在新动作没确认前,防止新动作对原动作的覆盖,需另存一个新的动作包。
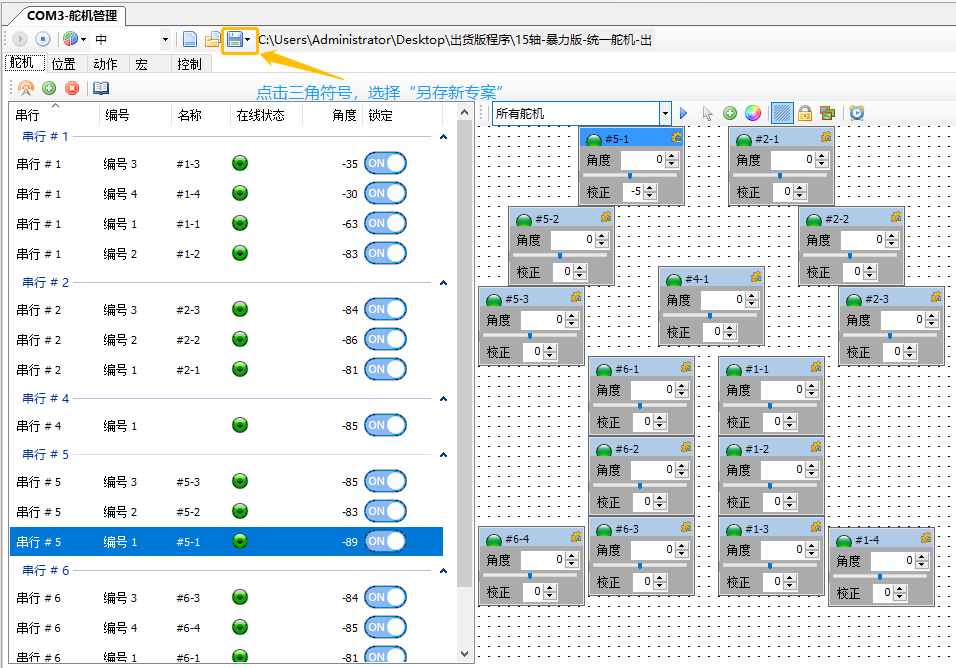
- 点击“储存专案”键,选择“另存专案”,如下图:
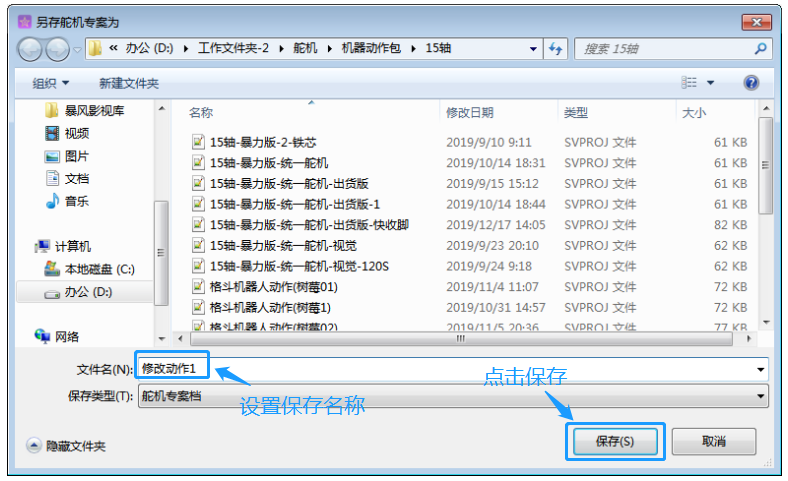
- 把新专案放在专用的文件夹,点击“保存”
此时,0位调整已经完成。