机器人基本动作的创建¶
1. 机器人和PC动作编辑器的连接¶
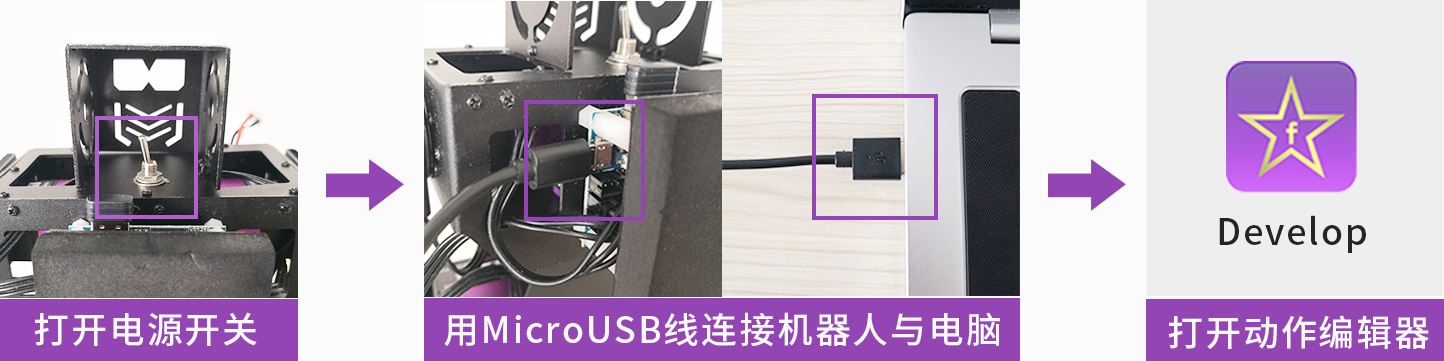
1.1. 连接PC¶
① 打开机器人电源开关,机器人通电(电源红色指示灯会常亮)
② 将Micro USB 数据线连接机器人与电脑
③ 打开电脑上的机器人动作编辑软件Develop.exe
注意:机器人连接顺序请按上述①-②-③步骤来连接,否则无法扫描出舵机
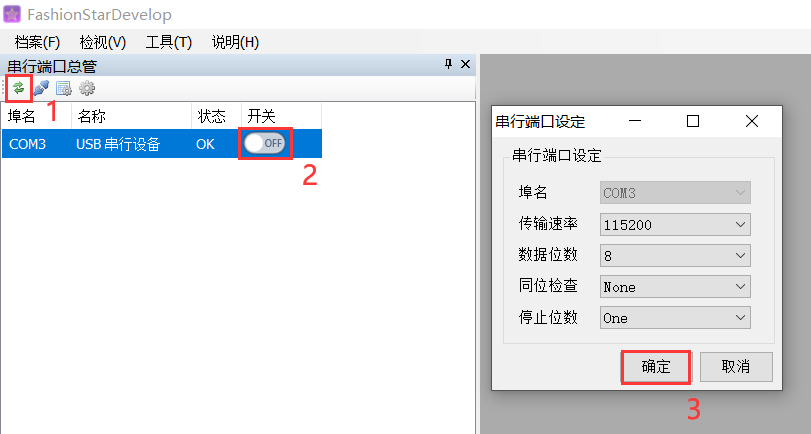
1.2. 连接串口¶
点击刷新串口①,会出现COM口,选中"USB串行设备",点击开关②,确认串行端口设定,点击”确定“③。
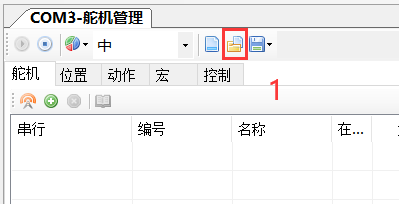
2. 将原始动作文件另存为新文件¶
① 点击“开启专案”
② 打开原始动作文件
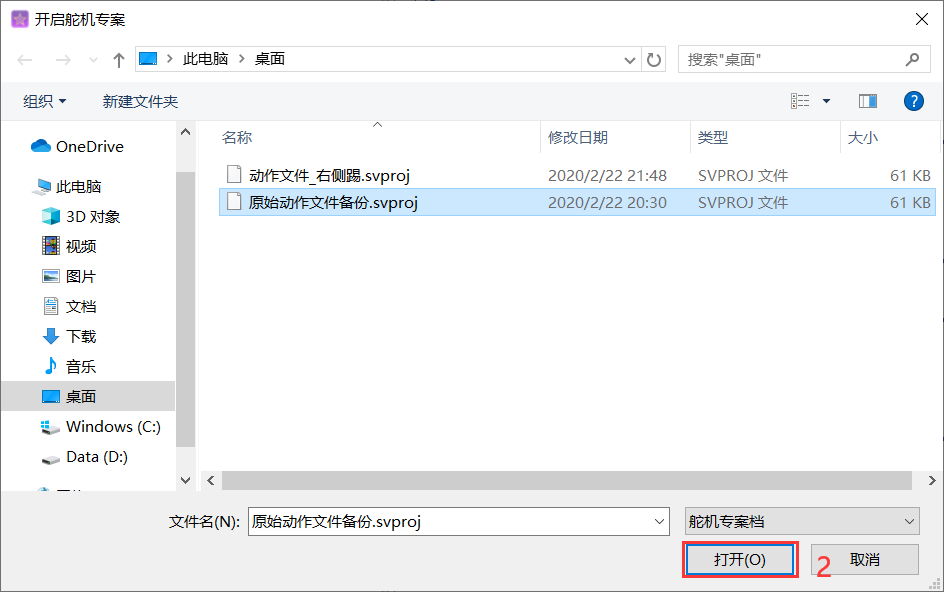
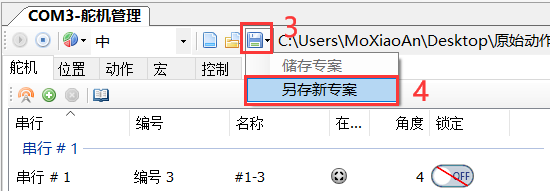
③ 点击“保存”按钮
④ 选择“另存新专案”
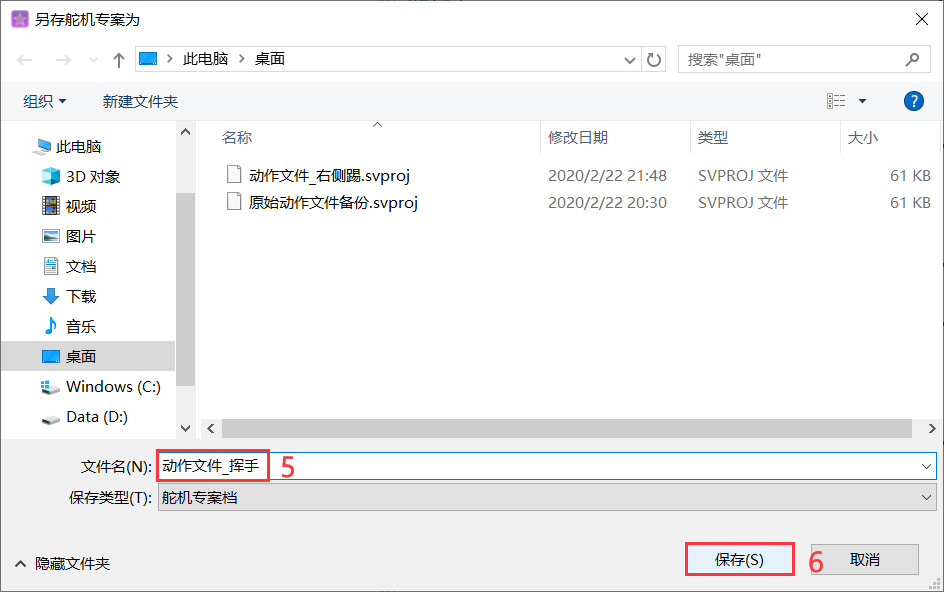
⑤ 命名为“动作文件_挥手”
⑥ 点击“保存”
3. 创建挥手动作¶
3.1. 扫描在线的舵机¶
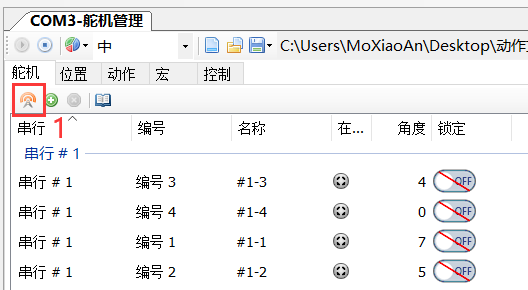
① 在“舵机”面板中,点击“扫描舵机”按钮
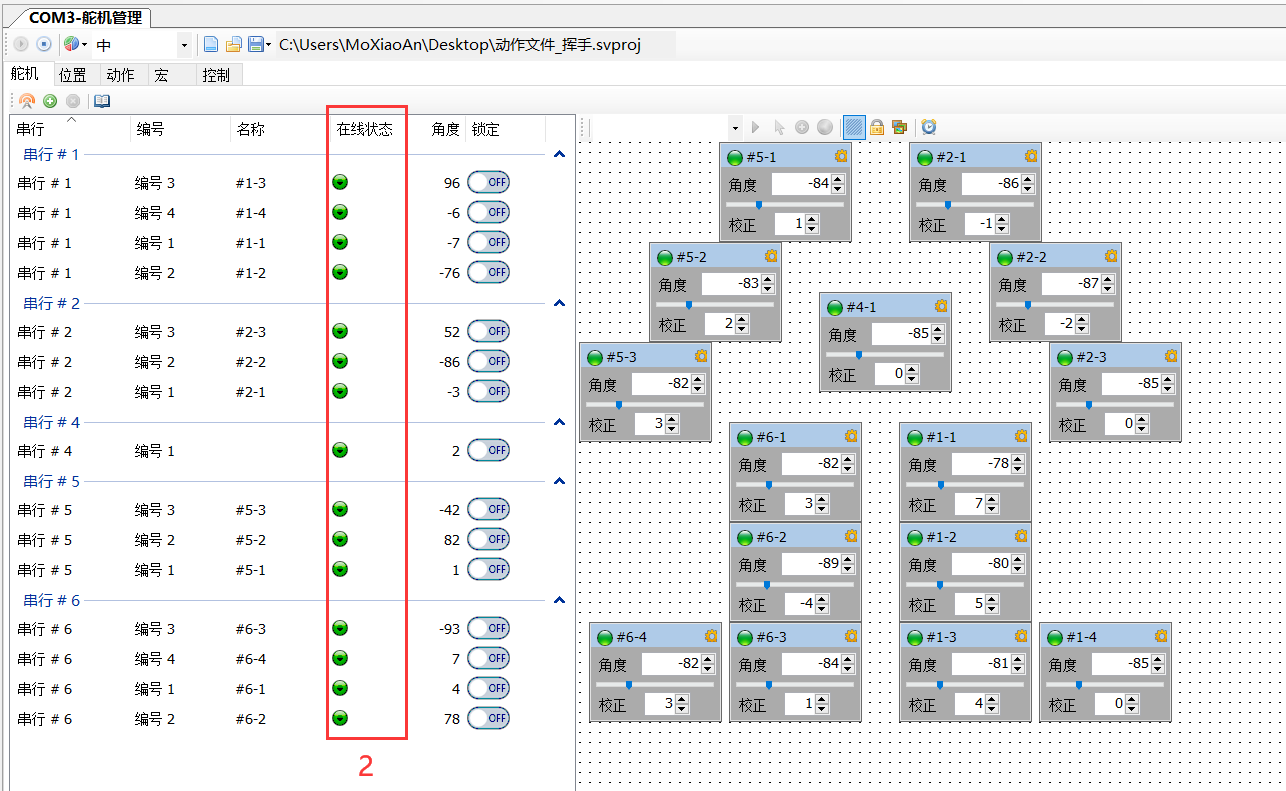
② 舵机显示均为“在线状态”
3.2. 添加单个动作¶
① 保持机器人与电脑连接,将机器人置于平坦开阔的地面上,摆放至跪立姿势,两手两脚尽量分开一定距离,手提机器人头部,如下图所示。
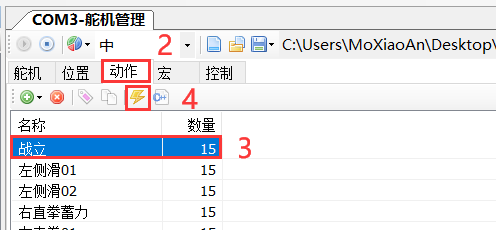
② 打开“动作”面板
③ 选择“战立”动作
④ 点击“执行动作”,机器人站立
⑤ 打开“舵机”面板
⑥ 将机器人右臂对应的5号串口舵机全部卸力
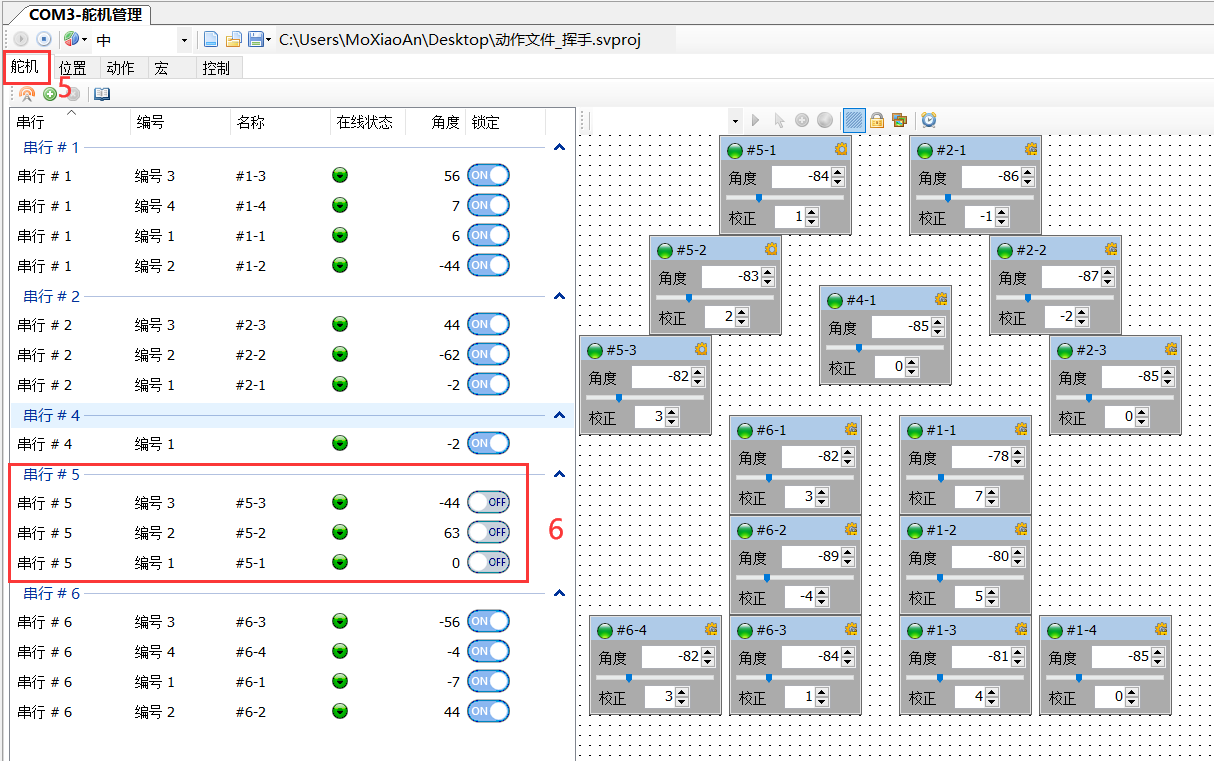
⑦ 将机器人右臂摆放到想要的位置

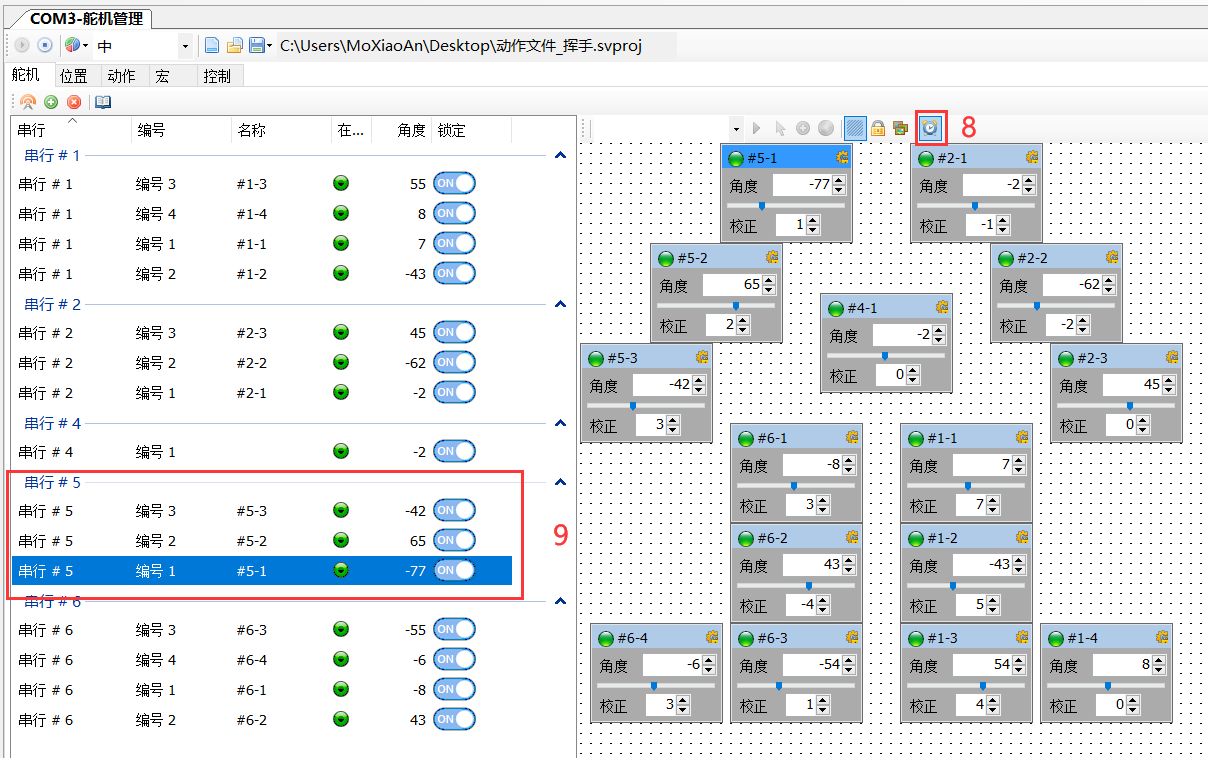
⑧ 点击小闹钟按钮,打开“实时模式”
⑨ 将舵机上力
注意:舵机的角度不能超出±88°
⑩ 打开“动作面板”
⑾ 点击“新增动作”按钮
⑿ 点击“以测量添加动作”
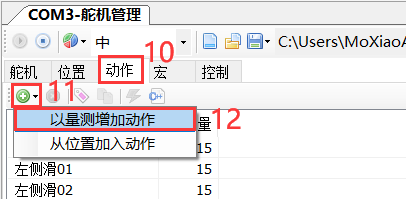
⒀ 输入“动作名称”,这里命名为“挥手1”
⒁ 勾选“设为相同的时间”
⒂ 设定动作的执行时间,这里设置为100毫秒
⒃ 点击确定,

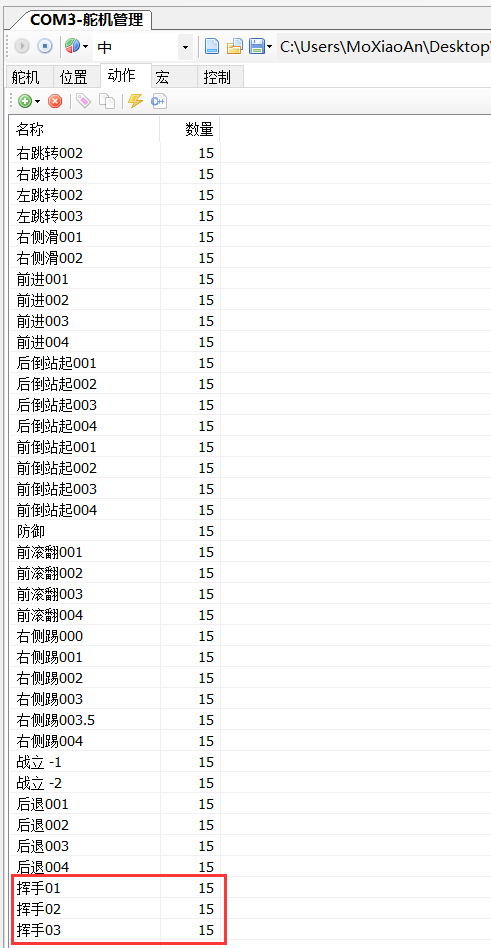
⒄ 重复执行6-16步骤,将挥手的分解动作依次录入进来。
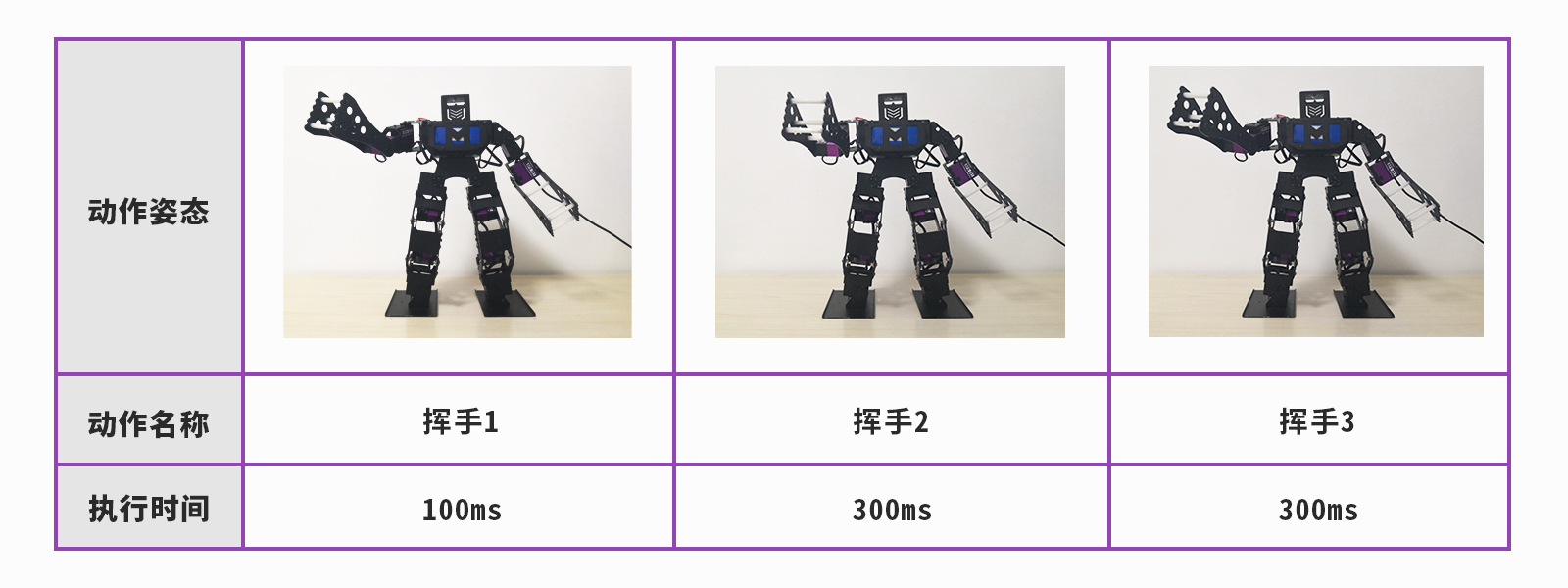
⒅ 在“动作”面板中依次执行,战立→挥手1→挥手2→挥手3→战立动作,查看机器人是否能够按照设定的动作执行。
3.3. 添加动作组(宏)¶
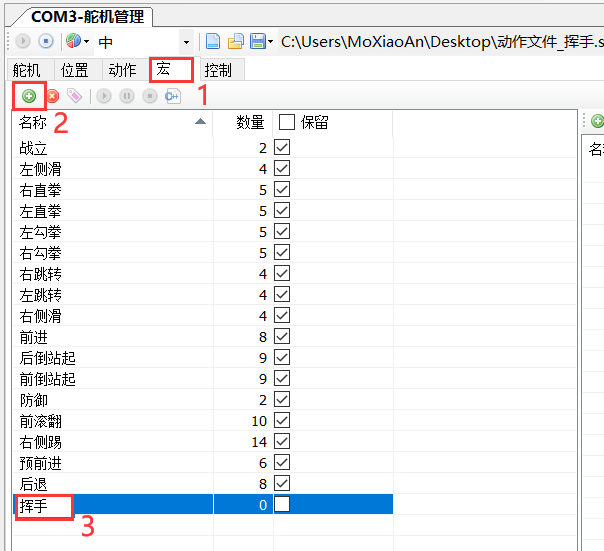
① 打开“宏”面板
② 点击“新增宏”按钮,添加一个动作组
③ 命名为“挥手”
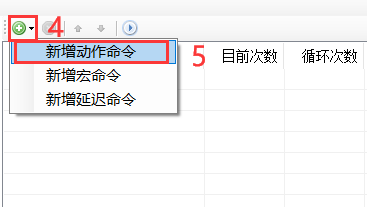
④ 点击“新增命令按钮”
⑤ 选择“新增动作命令”
⑥ 选择要添加的动作,点击“确定”
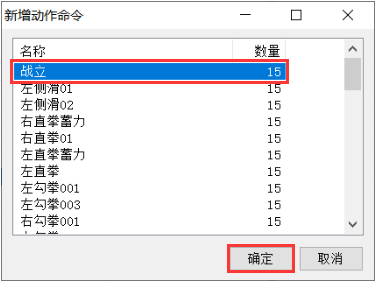
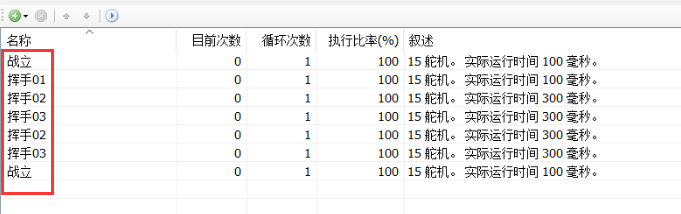
⑦ 依次添加动作,战立→挥手1→挥手2→挥手3→挥手2→挥手3→战立
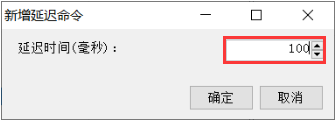
⑧ 动作与动作之间需要添加一定的延时时间,
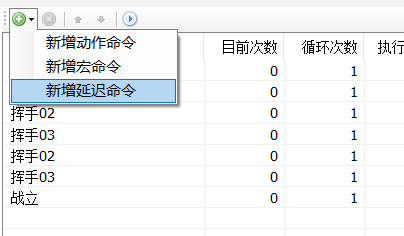
⑨ 我们设置延迟时间为100毫秒
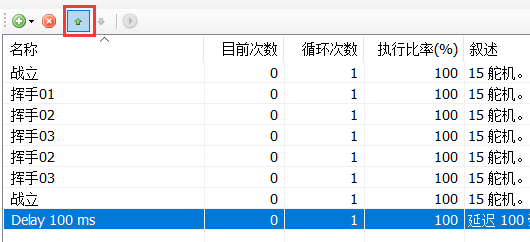
⑩ 可以点击“向上箭头”/“向下箭头”修改命令的位置
⑾ 点击“删除”,可以删除命令
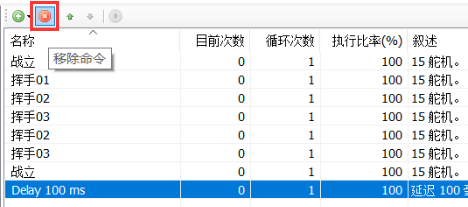
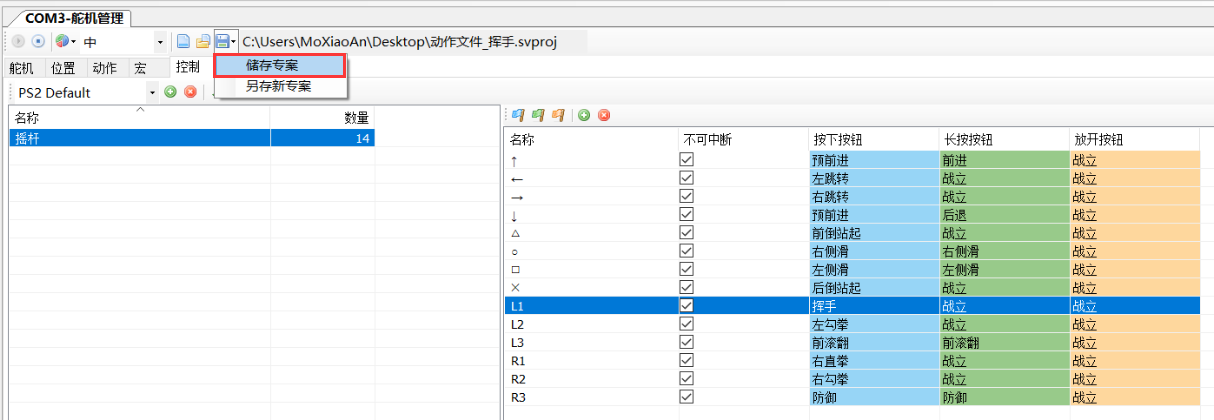
⑿ 添加的命令列表如下图所示

⒀ 将遥控手柄上的L1按钮动作修改为挥手
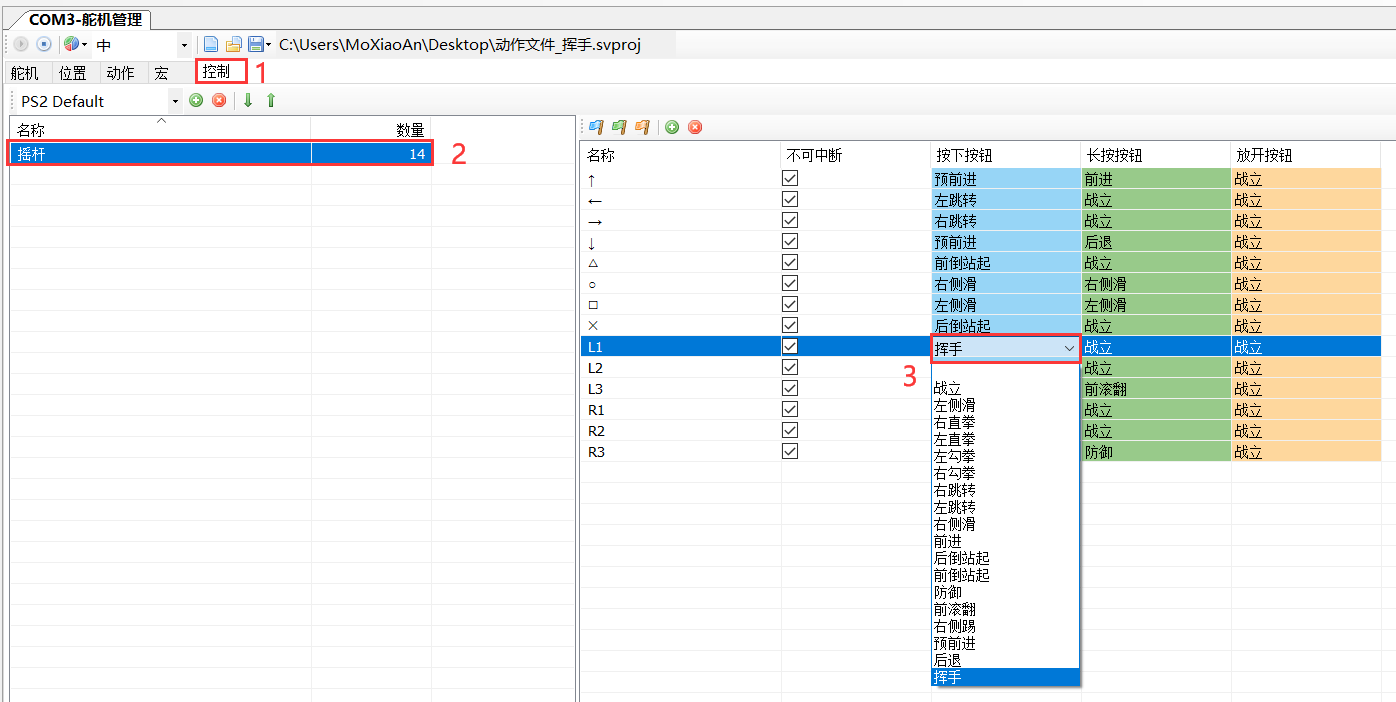
⒁ 点击“保存”
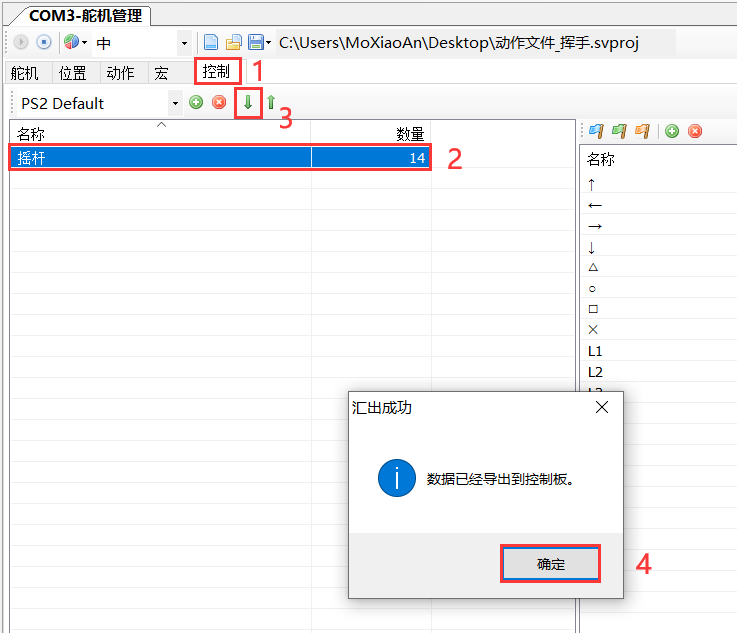
3.4. 下载数据¶
修改后的文件需要下载到机器人开发板上才可以通过手柄遥控。
① 点击”控制面板“
② 选择”摇杆“
③ 点击“向下箭头”,将数据下载到控制板上
④ 数据已经导出到控制板,点击”确定“
3.5. 手柄连接¶
注意:机器人启动前需两手两脚张开,正面朝下,置于地面。
断开Micro USB线,打开机器人电源和手柄电源,待手柄绿色指示灯由闪烁变为常亮,表示手柄连接成功,此时就可以手柄遥控机器人了。