总线伺服舵机C# SDK手册¶
1. 简介¶
1.1 命名空间¶
using BrightJade;
using BrightJade.Serial;
using FashionStar.Servo.Uart;
using FashionStar.Servo.Uart.Protocol;
1.2 定义与宣告¶
// Serial Port 管理器。
private SerialPortManager _serialPortManager;
// 舵机控制器。
private ServoController _servoController;
_serialPortManager = new SerialPortManager();
_servoController = new ServoController(_serialPortManager);
2. 代码撰写¶
2.1 Serial Port 管理器¶
2.1.1 SerialSettings 物件¶
SerialPortManager包装并管理 SerialPort对象的收发行为,并有一型态为SerialSettings的成员CurrentSerialSettings,储存相关信息。
2.1.2 初始化¶
SerialPortManager创建同时,会寻找目前装置所有可用的Serial Port,并将清单存于CurrentSerialSettings.PortNameCollection中。
其中第一个元素给予CurrentSerialSettings.PortName。同时根据选择的Baud,在CurrentSerialSettings.BaudRateCollection中更新可用Baud的清单。可以实作需求,自行调用。
其余参数正常状况下多维持初始值,若有需要请自行参考调用。
2.1.3 参考范例¶
以下是初始化范例:
// Serial Port 管理器。
private SerialPortManager _serialPortManager;
// 舵机控制器。
private ServoController _servoController;
_serialPortManager = new SerialPortManager();
_servoController = new ServoController(_serialPortManager);
// 接收事件。
_servoController.ReadAngleResponsed += OnReadAngleResponsed;
_servoController.ReadMultiTurnAngleResponsed += OnReadMultiTurnAngleResponsed;
_serialPortManager.ErrorOccured += OnErrorOccured;
在某个按钮的Click事件
在某个按钮的Click事件
在某个按钮的Click事件
2.2 舵机控制器的方法与事件¶
舵机控制器的方法可视为Tx请求封包;事件可视为Rx响应封包。

请参考文件:标准协议舵机通讯封包定义表,呼叫与封包命名同名的方法作为请求,接收命名后缀Responsed的事件,作为舵机信息响应。
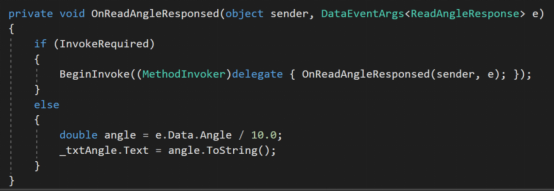
例如:上图ReadAngle封包,呼叫ServoController对象的ReadAngle()方法,即可向舵机询问角度。
接收ReadAngleResponsed事件,以处理回传的角度数值。
2.3 多线程处理¶
舵机控制器的事件,与UI的线程不同,必须额外处理,如下所示: