四足机器狗使用手册¶
1. 使用说明¶
机器狗上电等待一段时间,长按手柄share键10秒不松开,长按ps键,待手柄状态灯快速闪烁,松开ps键,待灯不闪,松开share键即配对成功。短按L1,机器狗即进入初始位置,再按R1,即可让机器狗进入小跑模式
按L1切换活动模式和停用模式 按R1切换休憩模式和小跑模式
左操作杆
前进/后退:在“小跑”模式下向前/向后移动机器狗 左/右:在“小跑”模式下向左/向右移动机器狗
右操作杆
前进/后退:向前和向后倾斜机器狗 左/右:左右旋转机器狗
方向键
前进/后退:升高和降低身体 左/右:向左/向右滚动身体
2. 组装视频¶
散件组装视频,请点击下面链接
3. 调试说明¶
3.1 启动和ssh¶
给机器狗上电,网线连接PC与树莓派的以太网端口,PC端点击WIFI图标打开网络与Internet设置,更改网络设置中点击更改适配器选项,选中WLAN,右键-属性-共享,勾选允许其他网络用户通过此计算机的Internet连接来连接

选中以太网,右键-属性,选中ipv4

双击,选择使用下面的IP地址,填入:10.0.0.51,子网掩码填入:255.255.255.0

点击确定,打开putty,输入10.0.0.52,点击打开

login界面,用户名pi,密码pi,提示错误的话,密码就是raspberry,依次输入并回车

进入树莓派系统

3.2 进入写模式¶
输入rw,回车

3.3 校准舵机¶
输入sudo systemctl stop robot,回车
输入cd StanfordQuadruped/,回车
输入sudo pigpiod,回车
输入python3 calibrate_servos.py,回车
输入11.333,进入舵机校准

通过输入a或b调整舵机角度

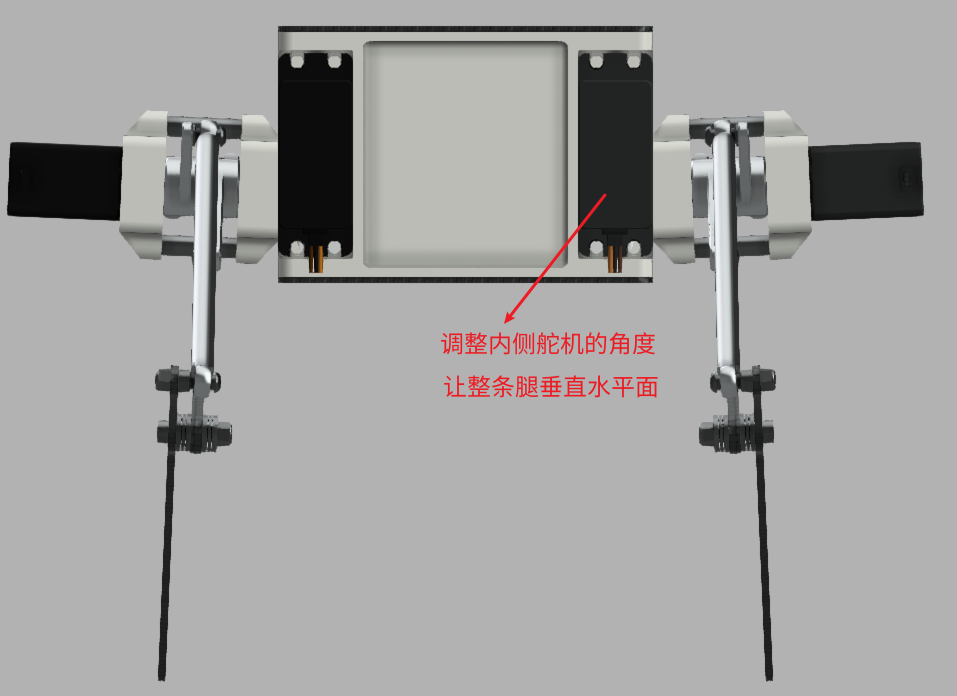
调整到主动轴结构与舵机平行或者垂直即可,如下示意图,因四只腿结构一样,以一只腿为例,第一个舵机,
第二个舵机,

第三个舵机,

每调整完一个舵机结束后输入d
调整角度合适输入yes进入下个舵机调整,若还需调整,输入no回到当前舵机继续调整角度

重复上述步骤,对12个舵机进行校准,校准结束,记录输出的角度值

输入sudo vi pupper/HardwareConfig.py,回车,进入配置文件修改

按i进入编辑模式,在对应位置修改角度值
按ESC,输入:wq,回车,保存修改

调试完毕,输入sudo reboot,回车重启机器狗
4. 注意事项¶
- 请在电压7V以上使用机器,在电压不足时,舵机扭力会有比较明显下降,也无法给树莓派稳定供电。电压低于7V,请立即充电,避免机器发生不可预估的问题
- 遥控器与树莓派进行蓝牙匹配时,建议将舵机放置在专用支架上,并让结构接近初始位置,并运动到初始位置无干扰初始位如下图,匹配完成,按完L1键,再将机器放置到地面
- 在给机器上电以后,个别舵机会有摆动,属于正常现象,因上电以后,树莓派的gpio口会有不确定的信号发送给舵机。请在电压及舵机稳定后,再做后续的操作
- 若需要重新调整位姿,请先将上盖板拆除,拆下树莓派,防止调试时树莓派上的以太网线和机器狗关节互相干扰