UART串行总线舵机的结构与参数¶
1. 概要¶
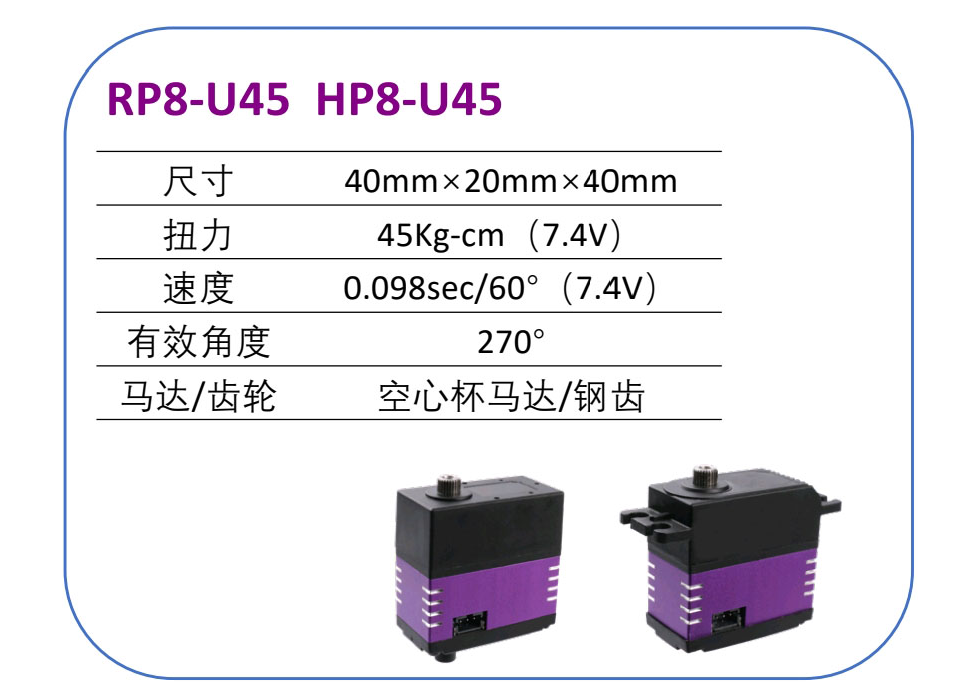
以**串行总线舵机(型号: RP8-U45)**为例,介绍舵机的外部特征、内部结构、舵机参数与组成部分的对应关系。
2. 舵机外部结构¶
**舵机(型号: RP8-U45)**的外壳由以下几部分构成:
- 舵机的上下盖,是用高强度的工程塑料精密注塑而成;
- 中段材质采用6063铝合金,经由CNC精密加工而成,内壁贴合马达,有利于电机与电路板的散热,提高电机的运行效率。
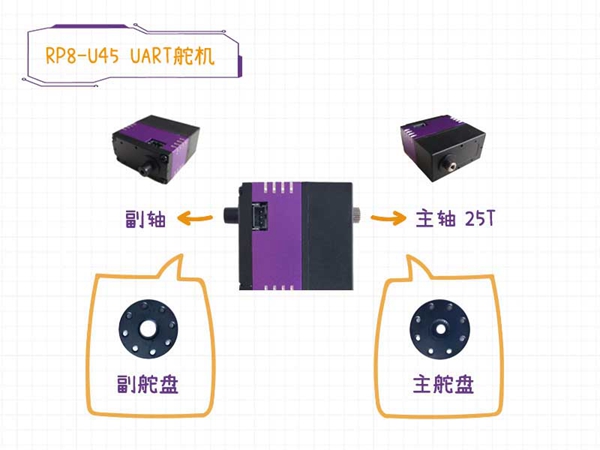
RP8-U45有两个轴,分别为主轴和副轴。主轴(Output Spline)**也叫舵机的**输出轴,是舵机齿轮组的最后一级齿轮。采用不锈钢材料,经由数控车床加工而成,满足舵机高强度和高精度的要求。
副轴 也叫**从动轴**,是一个光滑轴,和输出轴同心,用于分担主轴的压力。
**输出轴**的规格为25T。
注: 齿轮规格的**25T**,T代表的是齿轮的齿数(Teeth),所以25T代表齿轮有25个齿。
舵盘(Metal Servo Horn),也分主舵盘和副舵盘,分别和主轴及副轴配对使用。舵盘用于将输出轴与连杆或其他结构件(例如U型支架)连接。舵盘不但要和输出轴紧密结合,避免虚位产生,也要提供稳固的链接,方便各类支架安装。
RP8-U45舵机搭配的舵盘,是用7075航空铝合金材质CNC加工而成,采用沉降式台阶设计,并提供8个孔位,方便用户实现各个角度的安装。

另外RP8-U45舵机外壳上输出轴所在的两面,各有5个全对称的M2螺丝孔位,方便舵机与其他机械结构件的连接。
注:M2中M代表(公制 Metric),2是指的螺丝的直径为2mm。

舵机正反两面各有一个单总线串口接口。
单总线:UART通信接收端(Rx)跟发送端(Tx)共用一根线,数据发送与接收分时复用(半双工)。

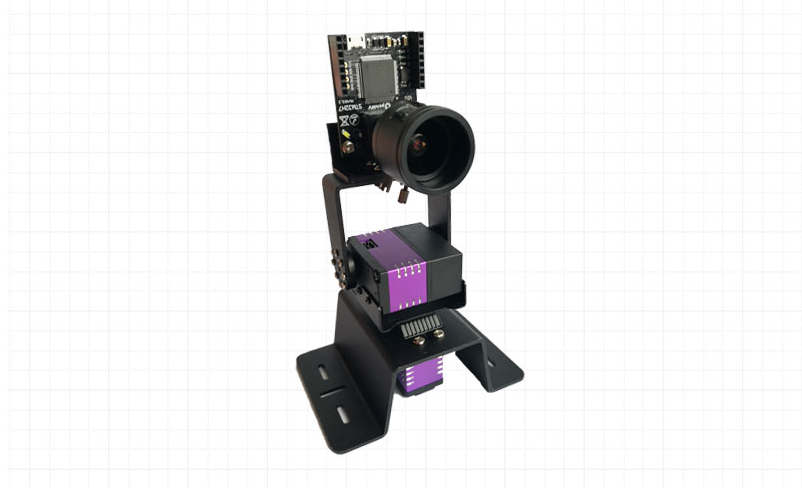
通过舵盘,U形支架与其他金属结构件,就可以搭建出任意自由度的机械臂/云台。
3. 舵机参数¶
3.1. 控制方式¶
串行总线舵机(型号: RP8-U45) 使用的通信协议为**单线半双工异步串行通信**(Half duplex Asynchronous Serial Communication),使用的电平标准为**TTL电平**(TTL Level)。
注:单线半双工异步串行通信是**UART(Universal Asynchronous Receiver/ Transmitter)** 通信协议中的一种。
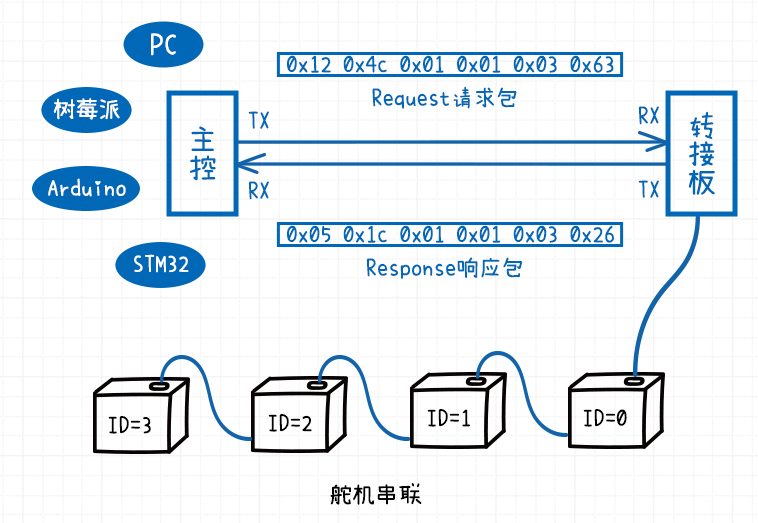
单线**的意思是信号线只有一根,同时负责舵机指令的发送与接收,数据发送与接收交替进行。 舵机两侧各有一个接口,通过转接线舵机就可以**串联在一条串行总线上。
串行总线舵机需要配合**舵机转接板UC01**使用,它的作用是将UART舵机的单线转换为双线TTL接口(Rx接收端,Tx发送端),通过双线TTL串口接口与单片机进行通信。或者通过转接板上的USB转TTL芯片(CH340),通过USB端口与PC进行通信。
UART舵机与PC/单片机之间按照特定的**串行总线舵机通信协议**进行指令传递与反馈数据的解析。
3.2. 舵机输入电压¶
舵机输入电压范围参考各舵机规格参数。舵机有欠压保护与过压保护,当输入电压超出额定电压范围时,电机不动作。
3.3. 空载最高转速¶
国内舵机转速的表示方法一般以**舵机空载时输出轴转过60度所需的时间**(单位 sec/60°)为参考。舵机空载的含义是,舵盘上没有负载,不悬挂任何负载的重物。同样,舵机转速与电压有关,电压越高电机的输出功率也就越高,输出轴的转速也就越快。
| 电压 | RP8-U45的舵机转速(sec/60°) |
|---|---|
| 6.0 v | 0.118 |
| 7.4 v | 0.098 |
| 8.4 v | 0.085 |
举例来讲,在7.4V的时候,舵机RP8-45在舵机空载的模式下,从0度旋转到60度仅需要0.098s。
4. 舵机内部结构¶
去掉金属外壳之后,我们可以看到齿轮组,电位器,直流马达以及控制电路板。
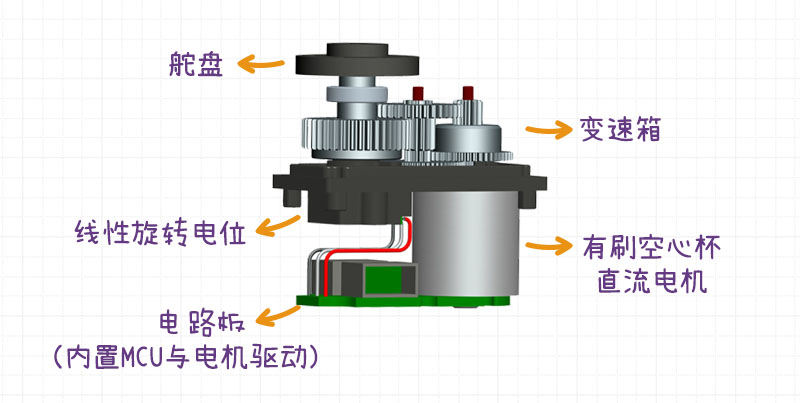
- 空心杯直流电机 | Coreless DC Motor 舵机里面的驱动器就是直流电机(DC Motor),直流电机也分为很多种不同的类型。RP8-U45 舵机所采用的电机类型为空心杯直流电机。
- 减速齿轮箱 | Reduction Gear Box 一般直流电机的转速比较快,但是扭矩小,所以直流电机的输出轴并不能直接作为舵机的输出轴。需要经过变速箱(减速齿轮)。齿轮组对直流电机进行减速,同时增大输出轴的扭矩。
- 线性旋转电位计 | VR 线性电位计也被称之为可变电阻器(VR,Variable Resistor)。旋转电位计与输出轴同轴,输出轴的角度旋转位移会按照线性关系转换为电阻的阻值。电路板上的MCU对电位计的电阻稳压电路进行ADC采样。通过ADC采样的电压值进一步得出当前舵机输出轴的角度,并给出目标位置的控制指令。
- 电路板 | Circuit Board 电路板上有单片机(MCU),电机驱动,电压测量电路,电流测量电路,温度感测线路,电位器ADC采样电路等。单片机负责接受单总线串口发送过来的各类指令,根据当前的运动状态以及目标运动状态进行计算,控制直流电机旋转,与此同时通过电位器的ADC采样获得舵机输出轴角度反馈信息。
5. 保持力矩与堵转力矩¶
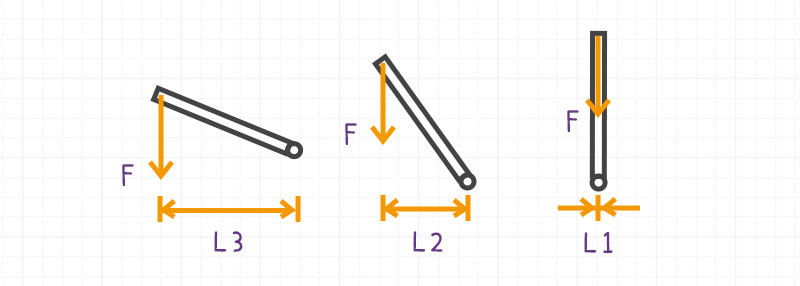
保持力矩,是指机械臂在静止状态下,舵机保持在特定角度,所需要的**力矩**(Torque,单位是N·m)。下图是一个理想模型,忽略了连杆的重量,连杆的末端有一个质量为m的物体。
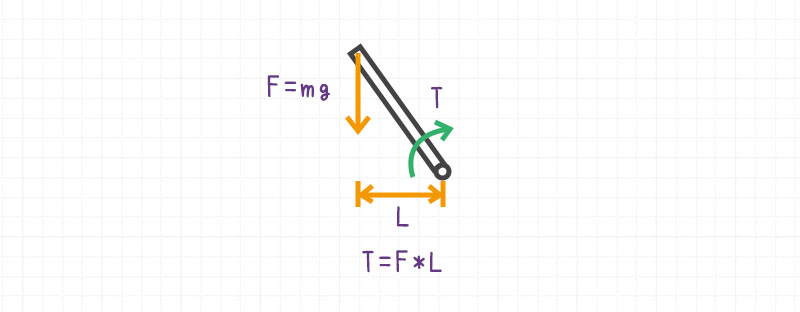
摇臂水平时,L与摇臂长度相同,此时舵机的保持力矩最大。
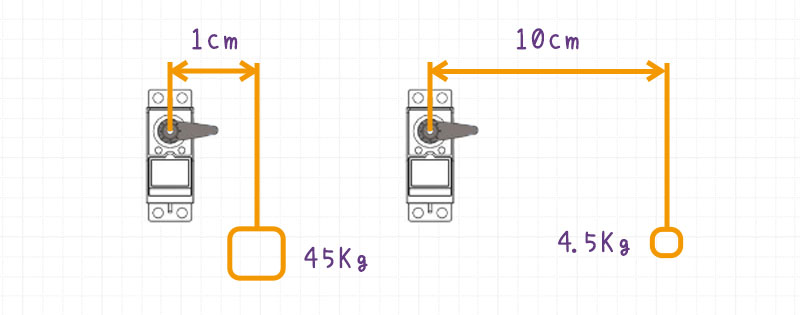
国内的**堵转扭矩**(Stall Torque)计算方式为,在舵盘上距离舵机主轴轴心位置处1cm的位置,舵机可以静挂的物体重量(单位 Kg),即为**摇臂为1cm时的保持力矩**。
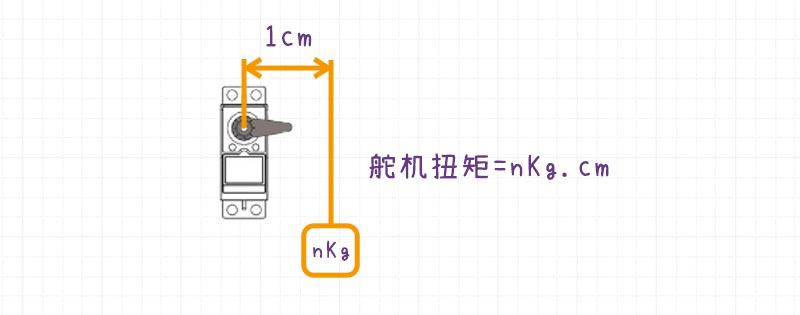
舵机的堵转力矩有两套单位,一套是国际单位N·m,另外一套是kg·cm 。二者之间的换算关系如下:
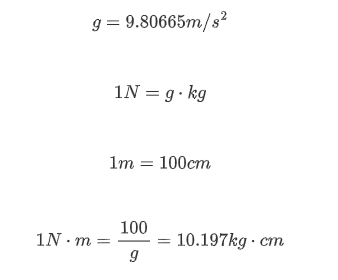
舵机的堵转力矩与电压有关系,电压越高直流电机的输出功率也就越大,堵转力矩因此也会增大。
| 电压 | RP8-U45的堵转力矩 |
|---|---|
| 6.0 v | 39 kg·cm |
| 7.4 v | 45 kg·cm |
| 8.4 v | 49 kg·cm |
当电压为7.4V时,摇臂长度为1cm的时候可以负载45kg的重物。根据**杠杆原理**可知,当臂长为10cm的时候,最多能负载4.5kg的重物。
6. 减速比¶
减速比(别名 齿比,Reduction Ratio)是由变速箱里面所配置的齿轮组决定的,减速比/齿比的定义是变速箱输入轴的转速与变速箱输出轴转速的比值。标准UART舵机(型号:RP8-U45)的减速比为273:1,也可以简写为273。
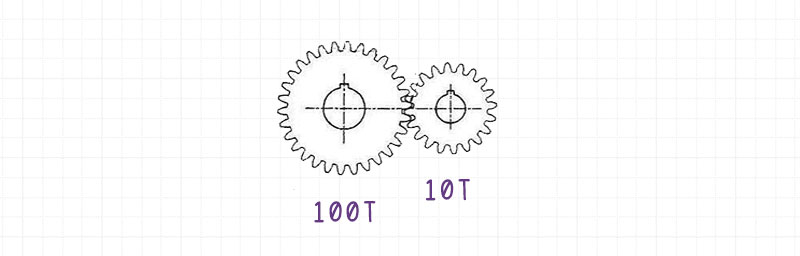
我们来看一个简单的抽象模型,将整个变速箱想象为一个大齿轮。假定直流电机主轴上的小齿轮是10齿的,大齿轮是100齿的。大齿轮旋转一圈,小齿轮就需要旋转10圈。假如1s内小齿轮可以旋转n圈(电机转速为 n转/s),大齿轮1s内只能旋转n/10 圈(输出轴的转速为n/10 转/s)。
所以减速比为:
一个直流电机,如果减速比越大,舵机输出轴的最大转速越慢,扭矩也就越大。同理,减速比越小舵机输出轴的最大转速越快,扭矩也就越小。
所以在选择舵机的时候,需要在扭矩与转速之间做取舍,根据自己的需求选择合适的减速比的舵机。举例来讲,假如舵机是用在机械臂上,舵机的转速要求不高,但是对负载有要求,这个时候就需要选择减速比较大的舵机。如果UART舵机是应用在小车上(轮转模式),对小车轮子的转速有要求,此时就需要选择减速比较小的舵机。