舵机通讯检测¶
1. 舵机通讯检测指令¶
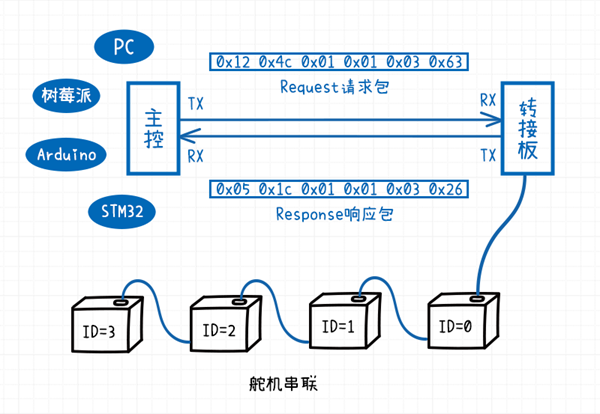
检查舵机是否在线,就需要用到PING指令。PING数据包的内容部分是舵机的ID。如果ID号的舵机存在且在线,总线伺服舵机在接收到PING指令时,会发送一个响应包。如果ID号的舵机不存在或者掉线,就不会有舵机发送响应数据包。
2. 操作流程¶
1 . 物理接线
①STM32与STLinkV2相连接
②STM32的UART1接总线伺服舵机转接板
③总线伺服舵机转接板上接一个舵机ID为0的总线伺服舵机
④STM32的UART2接USB转TTL模块
注: 接线部分请参考1.4接线说明
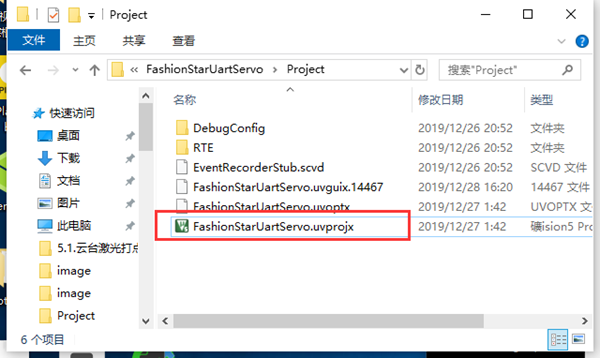
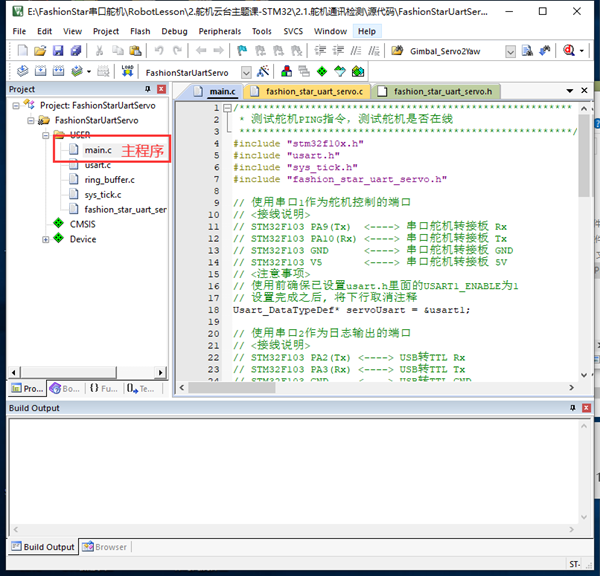
2 . 打开STM32例程的工程文件
3 . 代码编译
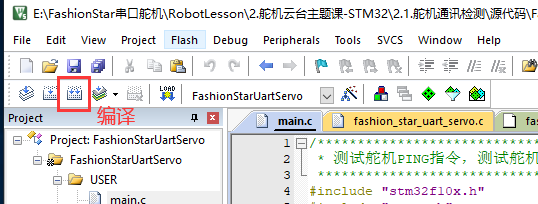
日志输出:编译成功
4 . 将STLinkV2与电脑的USB相连接
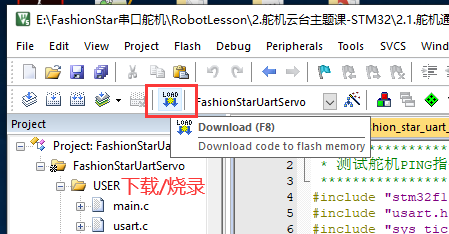
5 . 将固件下载到STM32
固件载入到STM32 Flash成功的日志输出
6 . 给舵机供电
电池接在UART舵机转接板上。
7 . 将USB转TTL与电脑USB口相连接
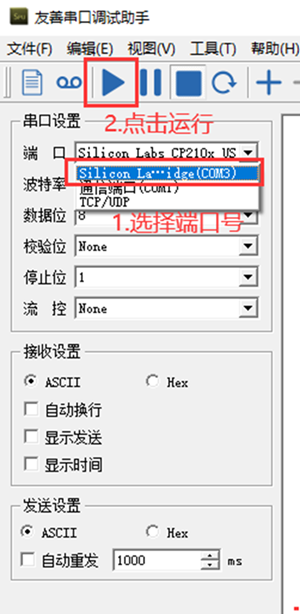
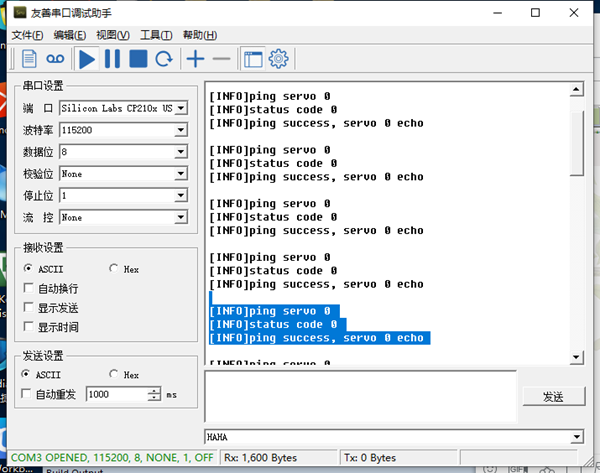
8 . 打开串口调试助手软件
选择对应的设备号,配置波特率为115200,打开串口。
注: 这里以友善串口调试助手为例
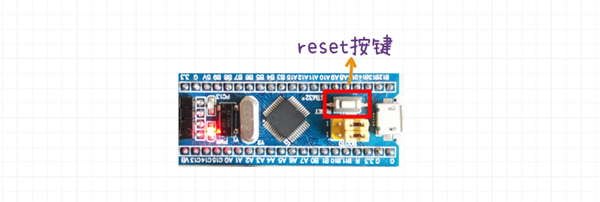
9 . 重置STM32
按下STM32开发板上的RESET 重置按钮。STM32执行新写入的固件。
注:只有按下重置按键,STM32才会执行新烧录的固件。
10 . 查看串口调试助手上的日志信息
3. 硬件资源初始化¶
首先是引入四个依赖的库文件。
#include "stm32f10x.h"
#include "usart.h"
#include "sys_tick.h"
#include "fashion_star_uart_servo.h"
第一个stm32f10x.h是STM32F103的标准库,剩下三个是自定义的库。
sys_tick.h
管理系统时间,通过配置系统定时器中断,实现了延时以及倒计时的逻辑。
usart.h
串口通信的库。通过配置宏,可以方便的打开关闭STM32F103C8开发板上三个USART资源。
fashion_star_uart_servo.h
封装了Fashion Star 总线伺服舵机的通信协议,是总线伺服舵机STM32F103版本的SDK。
首先定义两个Usart_DataTypeDef 结构体指针。
串口1用于舵机控制,指针servoUsart指向usart1。
串口2用于日志输出,指针loggingUsart指向usart2。
接下来依次进行滴答定时器初始化与串口初始化。
4. API使用说明¶
接下来就是舵机通讯检测函数FSUS_Ping,依次传入串口数据结构体指针servoUsart,还有舵机的ID号servoId。
statusCode是返回的状态码FSUS_STATUS,如果是请求成功则返回0,如果是其他的数值则意味着舵机通讯检测失败。可以在fashion_star_uart_servo.h 文件里面查阅不同的statusCode对应的错误。
// FSUS状态码
#define FSUS_STATUS uint8_t
#define FSUS_STATUS_SUCCESS 0 // 设置/读取成功
#define FSUS_STATUS_FAIL 1 // 设置/读取失败
#define FSUS_STATUS_TIMEOUT 2 // 等待超时
#define FSUS_STATUS_WRONG_RESPONSE_HEADER 3 // 响应头不对
#define FSUS_STATUS_UNKOWN_CMD_ID 4 // 未知的控制指令
#define FSUS_STATUS_SIZE_TOO_BIG 5 // 参数的size大于FSUS_PACK_RESPONSE_MAX_SIZE里面的限制
#define FSUS_STATUS_CHECKSUM_ERROR 6 // 校验和错误
#define FSUS_STATUS_ID_NOT_MATCH 7 // 请求的舵机ID跟反馈回来的舵机ID不匹配
5. 主程序完整源码¶
/********************************************************
* 测试舵机PING指令,测试舵机是否在线
********************************************************/
#include "stm32f10x.h"
#include "usart.h"
#include "sys_tick.h"
#include "fashion_star_uart_servo.h"
// 使用串口1作为舵机控制的端口
// <接线说明>
// STM32F103 PA9(Tx) <----> 总线伺服舵机转接板 Rx
// STM32F103 PA10(Rx) <----> 总线伺服舵机转接板 Tx
// STM32F103 GND <----> 总线伺服舵机转接板 GND
// STM32F103 V5 <----> 总线伺服舵机转接板 5V
// <注意事项>
// 使用前确保已设置usart.h里面的USART1_ENABLE为1
// 设置完成之后, 将下行取消注释
Usart_DataTypeDef* servoUsart = &usart1;
// 使用串口2作为日志输出的端口
// <接线说明>
// STM32F103 PA2(Tx) <----> USB转TTL Rx
// STM32F103 PA3(Rx) <----> USB转TTL Tx
// STM32F103 GND <----> USB转TTL GND
// STM32F103 V5 <----> USB转TTL 5V (可选)
// <注意事项>
// 使用前确保已设置usart.h里面的USART2_ENABLE为1
Usart_DataTypeDef* loggingUsart = &usart2;
// 重定向c库函数printf到串口,重定向后可使用printf函数
int fputc(int ch, FILE *f)
{
while((loggingUsart->pUSARTx->SR&0X40)==0){}
/* 发送一个字节数据到串口 */
USART_SendData(loggingUsart->pUSARTx, (uint8_t) ch);
/* 等待发送完毕 */
// while (USART_GetFlagStatus(USART1, USART_FLAG_TC) != SET);
return (ch);
}
// 连接在转接板上的总线伺服舵机ID号
uint8_t servoId = 0;
// 发送Ping请求的状态码
FSUS_STATUS statusCode;
int main (void)
{
// 嘀嗒定时器初始化
SysTick_Init();
// 串口初始化
Usart_Init();
while (1)
{
printf("\r\n");
// Ping一下舵机
printf("[INFO]ping servo %d \r\n", servoId);
statusCode = FSUS_Ping(servoUsart, servoId);
printf("[INFO]status code %d \r\n", statusCode);
// 根据状态码做不同的处理
if (statusCode == FSUS_STATUS_SUCCESS){
printf("[INFO]ping success, servo %d echo \r\n", servoId);
}else{
printf("[ERROR]ping fail, servo %d not online \r\n", servoId);
}
// 等待1000ms
SysTick_DelayMs(1000);
}
}