进阶操作¶
1. 初始角度设定¶
每个舵机的角度都有偏差,需对机械臂的四个舵机的角度进行调整,并填入至相关代码中
2.设定方法¶
2.1 使用上位机软件获取角度¶
2.1.1 所需工具及软件¶
三角尺,直尺,用于角度测量
Uart上位机软件
2.1.2 连接设置¶
1. 连接顺序¶
- 打开手臂电源开关,Ardurobo2控制板电源指示灯LED红灯常亮
- 连接Micro USB线到电脑:USB线小的一头连接Ardurobo2控制板Micro USB口,另一头连接到电脑
- 打开电脑上安装的**UART舵机上位机**(Develop.exe)软件
- 注意:请按照①→②→③步骤进行,否则无法扫描出手臂上的舵机
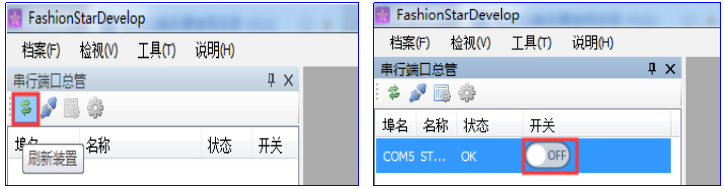
- 点击刷新装置,会出现以STM字母开头的COM口,如下图:
- 打开开关按钮由OFF变为ON的状态,此时会弹出提示框,如下图:
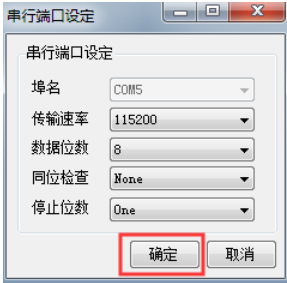
2. 波特率设置¶
- 传输速率默认为115200,直接点击【确定】按钮后,出现如下图:
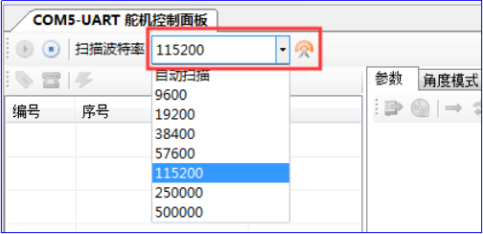
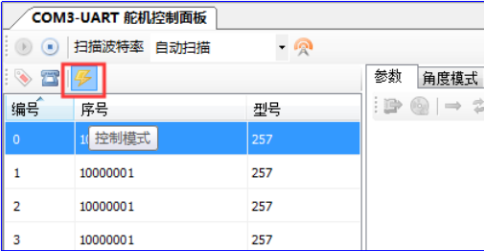
- 选择【扫描波特率】为115200,再点击右侧图标【扫描舵机】按钮,会扫描出所有舵机(编号为0、1、2、3的舵机)分别对应舵机编号ID0、ID1、ID2、ID3
2.1.3 具体操作¶
舵机ID示意图:
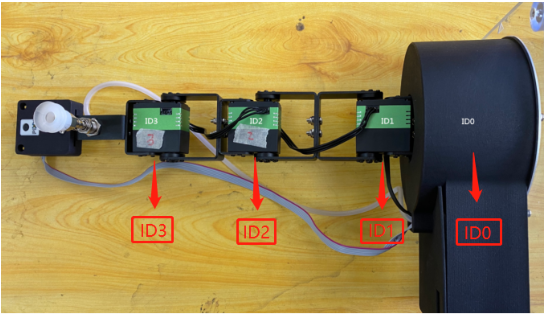
分别对这四颗舵机进行角度设定(需调整12个角度值),如下图:
| ID0 | ID1 | ID2 | ID3 | |
|---|---|---|---|---|
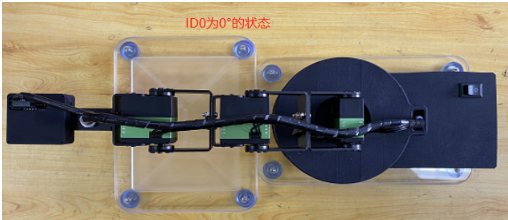
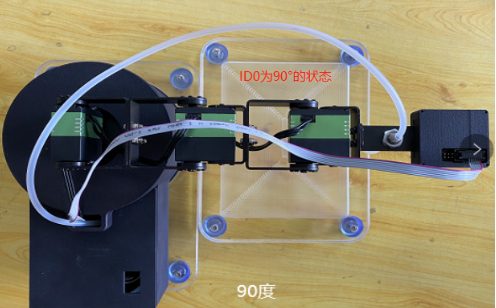
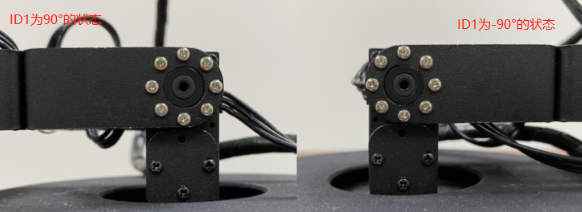
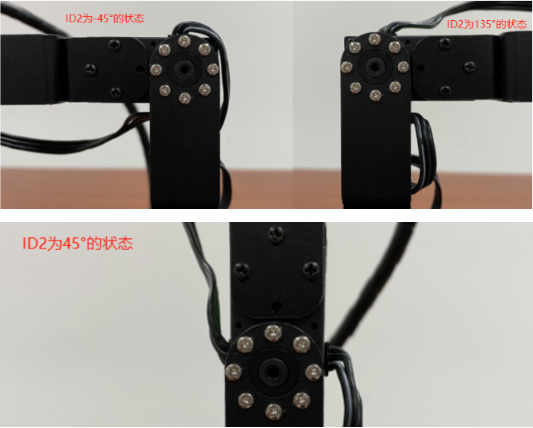
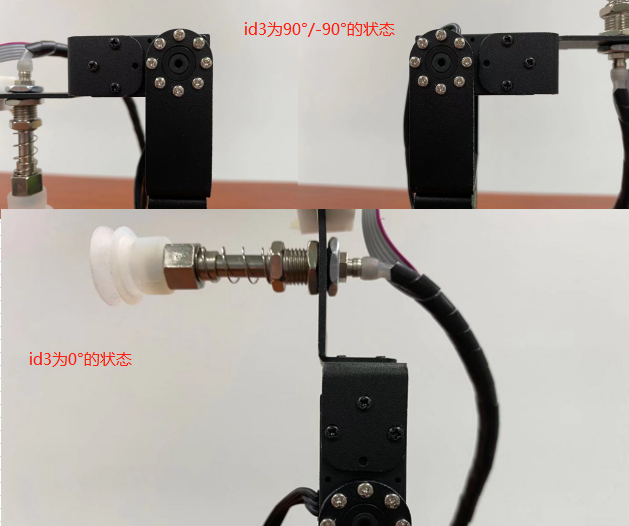
| 角度1 | 90° | 90° | 135° | 90° |
| 角度2 | 0° | 0° | 45° | 0° |
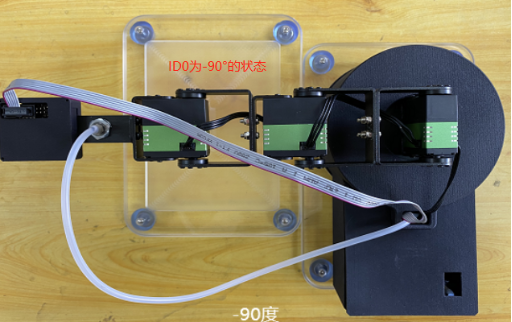
| 角度3 | -90° | -90° | -45° | -90° |
上表为理想状态的舵机角度值,需进行微调
1.调整操作¶
- 选中舵机,点击【控制模式】按钮,如下图:
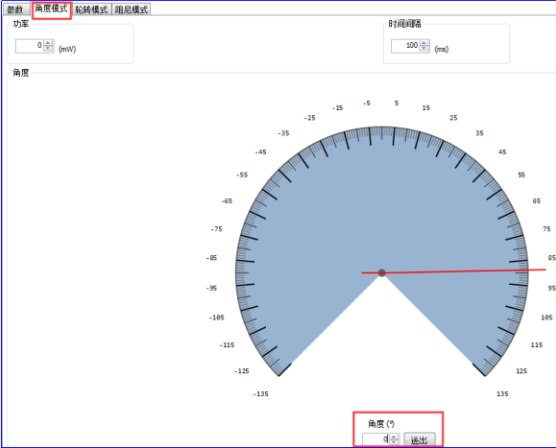
- 选择Angle Mode(角度模式),填入角度,送出,即可调整选中舵机角度,如下图:
2. 实际效果图¶
- ID0调节角度效果实图
- ID1调节角度效果实图

- ID2调节角度效果实图
- ID3调节角度效果实图
3. 记录数据¶
调整完毕,记录相关角度,将获取的数据同步修改到FashionStar_Arm4DoF.h里面。
// 舵机标定参数示例
#define FSARM_JOINT1_P90 -86.6 //关节1为90°时的舵机原始角度,对应id0为-90°
#define FSARM_JOINT1_N90 94.2 //关节1为-90°时的舵机原始角度,对应id0为90°
#define FSARM_JOINT2_P0 84.7 //关节2为0°时的舵机原始角度,对应id1为90°
#define FSARM_JOINT2_N90 -5.1 //关节2为-90°时的舵机原始角度,对应id1为0°
#define FSARM_JOINT3_P90 -46.2 //关节3为90°时的舵机原始角度,对应id2为-45°
#define FSARM_JOINT3_N90 131.6 //关节3为-90°时的舵机原始角度,对应id2为135°
#define FSARM_JOINT4_P90 -90.5 //关节4为90°时的舵机原始角度,对应id3为-90°
#define FSARM_JOINT4_N90 91.4 //关节4为-90°时的舵机原始角度,对应id2为90°
2.2 使用串口助手获取角度¶
2.2.1 所需工具¶
三角尺,直尺,用于角度测量
USB转TTL模块CP2102
串口助手软件
2.2.2 连接步骤¶
- 安装USB转TTL模块的驱动程序。
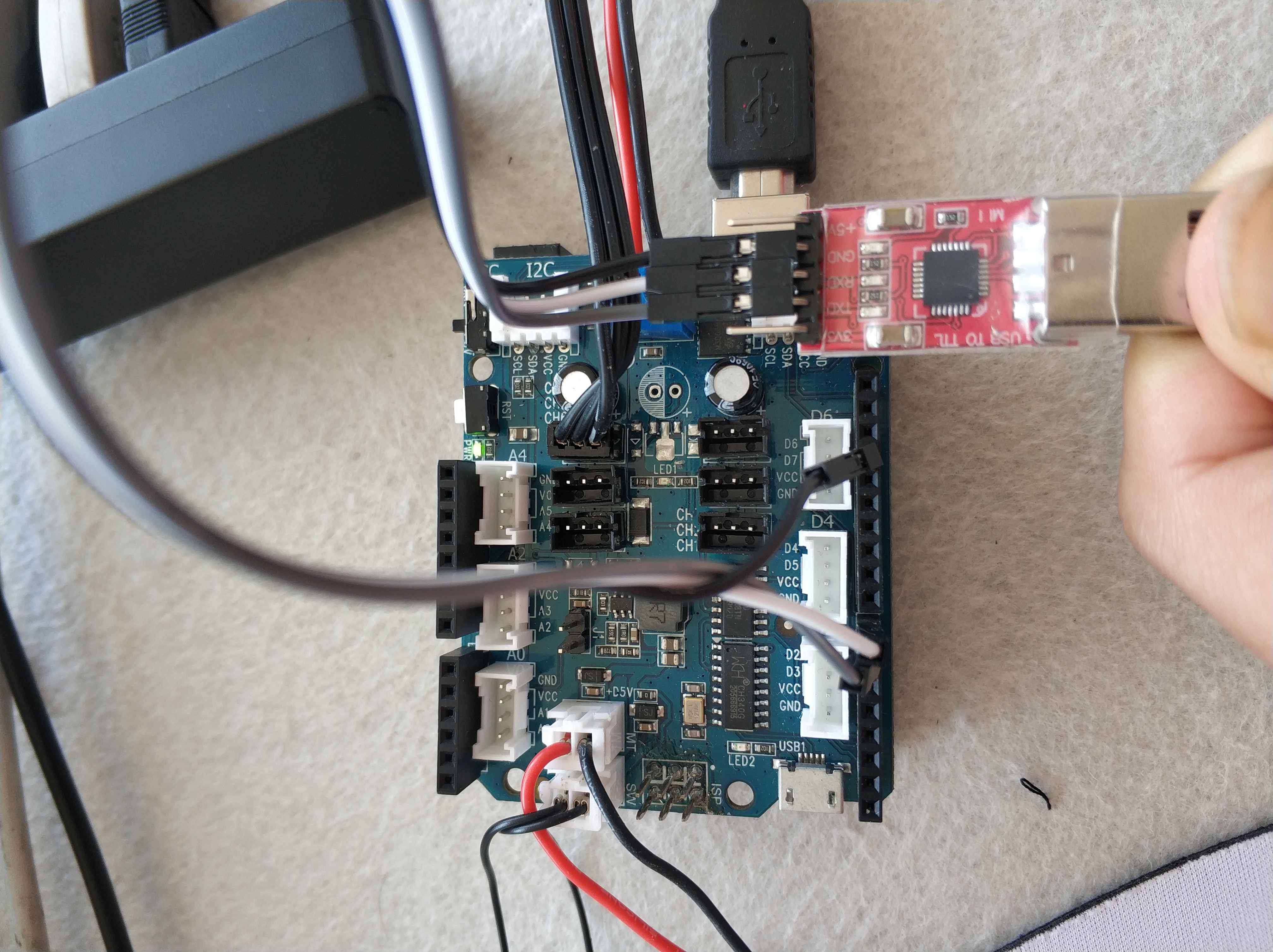
- 将Arduino跟USB转TTL模块通过杜邦线相连。
| Arduino UNO | USB转TTL模块 |
|---|---|
| pin 6 (软串口RX 接收端) | Tx (USB转TTL模块的接收端) |
| pin7 (软串口Tx 发送端) | Rx (USB转TTL模块的发送端) |
| GND | GND |
实物图
- 将USB转TTL模块插入到电脑的USB口上。
- 打开串口调试助手软件, 选择USB转TTL模块的端口号, 配置如下。
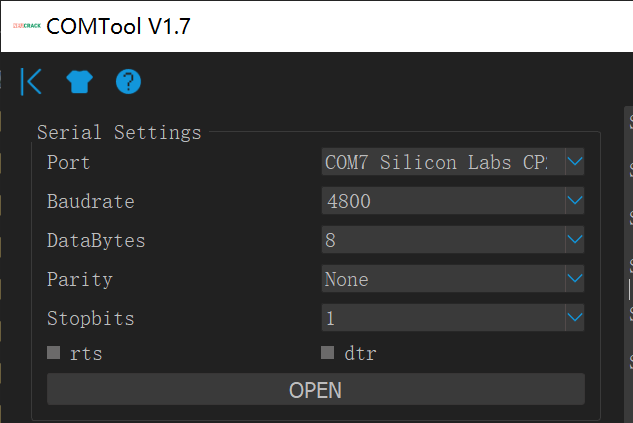
点击Open , 打开端口。
- 打开
Arduino IDE > Examples > FashionStar_ARM4DoF > software_serial
将例程烧录到Arduino UNO 里面。
- 查看运行效果。
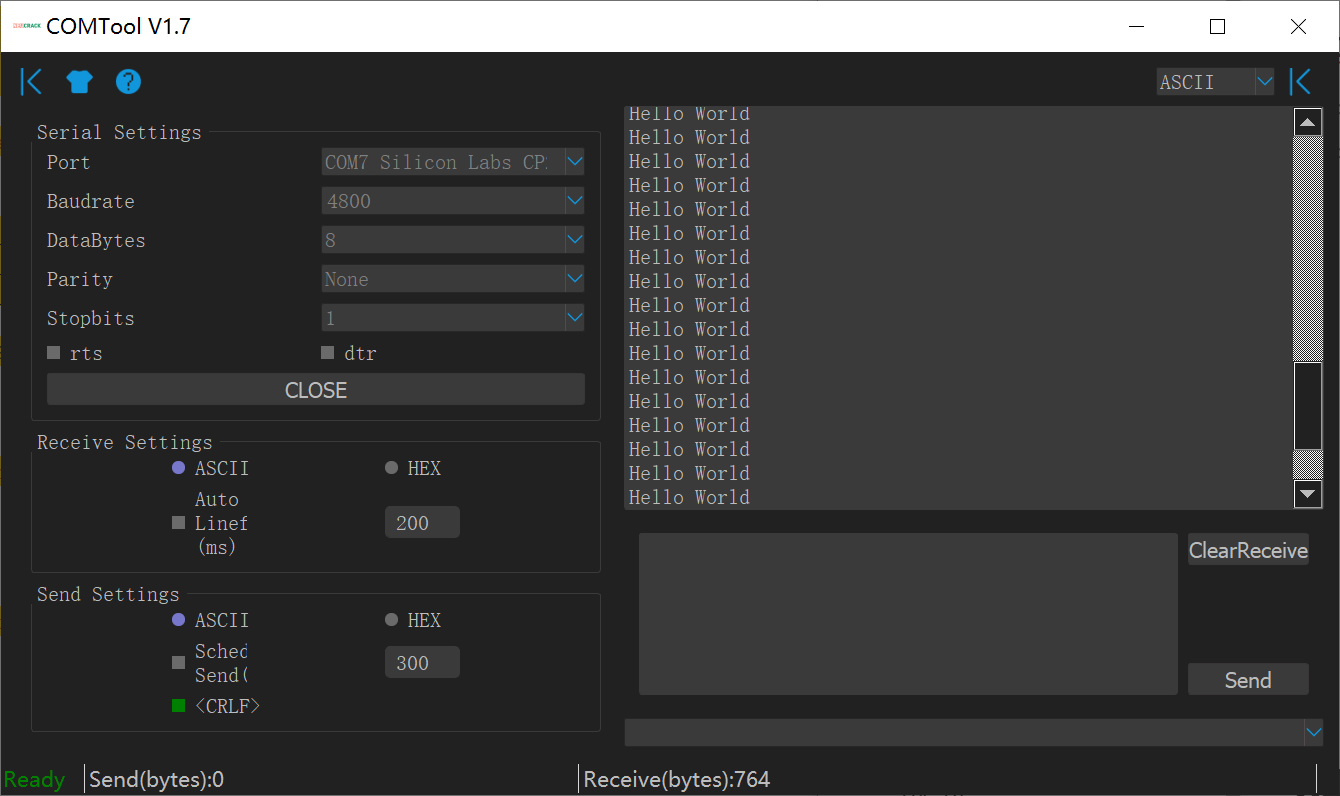
即表示通讯正常。
2.2.3 角度获取¶
- 运行
arm_damping_mode.ino例程, 在阻尼模式下,将机械臂的关节掰到指定的位置, 并用串口助手读取此时舵机的原始角度, 记录下来。 - 将采集的数据同步修改到
FashionStar_Arm4DoF.h里面。
// 舵机标定参数示例
#define FSARM_JOINT1_P90 -86.6 //关节1为90°时的舵机原始角度,对应id0为-90°
#define FSARM_JOINT1_N90 94.2 //关节1为-90°时的舵机原始角度,对应id0为90°
#define FSARM_JOINT2_P0 84.7 //关节2为0°时的舵机原始角度,对应id1为90°
#define FSARM_JOINT2_N90 -5.1 //关节2为-90°时的舵机原始角度,对应id1为0°
#define FSARM_JOINT3_P90 -46.2 //关节3为90°时的舵机原始角度,对应id2为-45°
#define FSARM_JOINT3_N90 131.6 //关节3为-90°时的舵机原始角度,对应id2为135°
#define FSARM_JOINT4_P90 -90.5 //关节4为90°时的舵机原始角度,对应id3为-90°
#define FSARM_JOINT4_N90 91.4 //关节4为-90°时的舵机原始角度,对应id2为90°
关节的定义可查看使用手册中机械臂标定内容,对应id角度实际图示可查看2.1.3中实际效果图。
3. 设定机械零点¶
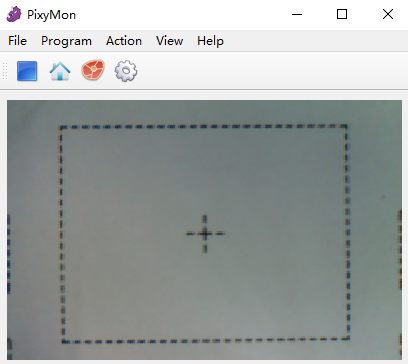
1.运行Arduino例程arm_home.ino , 让机械臂末端运行到预设的位置上,通过修改FashionStar_Arm4DoF.h中的相关代码参数,不断烧录例程,优化pixy2摄像头捕捉到的界面。
// HOME
// 摄像头处于工作台中心的正上方,
// 工作台的四个角点刚刚填满整个画面.
#define FSARM_HOME_X 12.2
#define FSARM_HOME_Y 0
#define FSARM_HOME_Z 8.3
pixy2捕捉的画面需使用USB连接pixy2与电脑,打开PixyMon软件。
2.优化以后实际效果图如下:
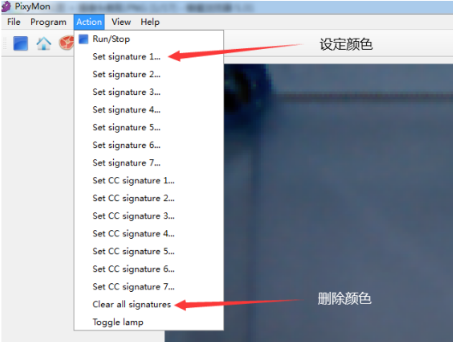
4.设置颜色签名Color Signature¶
颜色签名:
| 颜色签名 | 颜色 |
|---|---|
| 1 | 红 |
| 2 | 黄 |
| 3 | 蓝 |
| 4 | 绿 |
- 点击【Action】,出现如下图颜色选择:
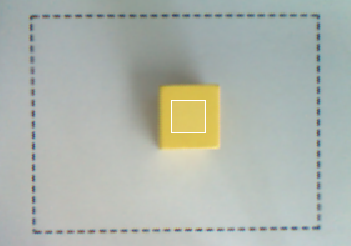
- 放入色块,进行颜色设定,单击set signature,长按鼠标左键勾选颜色区域。
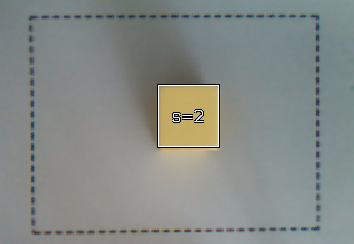
- 出现下图即表示成功勾选。
5. 功能测试¶
运行arm_grasp_cubic_with_pixy.ino程序,将色块放置在工作区域,观察机械臂是否正常抓取和放置。