软件界面功能说明¶
1.通讯界面¶
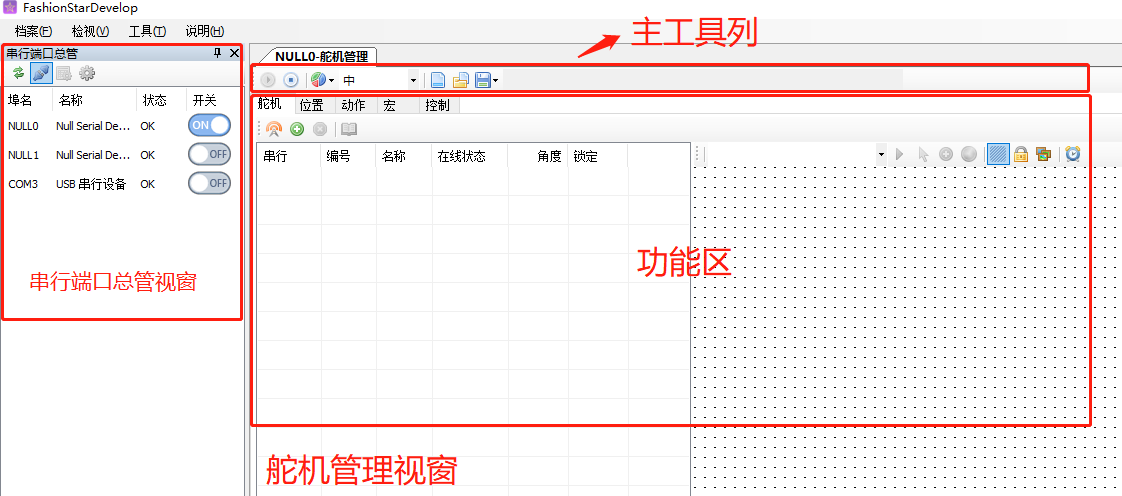
电脑通过串行端口总管与舵机控制板进行资料传输,开启【串行端口总管】视窗,可管理舵机与电脑之间的通讯。
1.1. 串行端口总管¶
点击【检视】,弹窗后选择【串行端口总管】来开启视窗,如下图:

按钮说明:
上图数字**1**为【刷新装置】按钮,可刷新已连接至电脑的串口
上图数字**2**为【离线模式】按钮,可模拟虚拟串口装置,以供离线编辑使用
2. 舵机管理界面¶
- 在【串行端口总管】选取串口装置,按下开关按钮后,将会出现串行端口设定视窗,如下图:
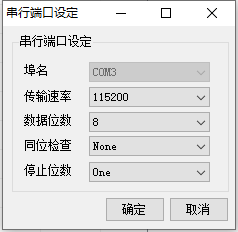
- 目前控制板设定传输速率为115200,数据位数为8,同位检查None,以及停止位数One。
- 设置完成按下确定后,出现舵机管理视窗,如下图:
2.1. 主工具列按钮说明¶
按钮从左至右分别为:
- **开启串行端口按钮:**开启串行端口,对控制板进行连线作业。
- **关闭串行端口按钮:**关闭串行端口,对控制板停止连线作业。
- **转角单位按钮:**有角度和ADC可选择,角度与ADC在零值相等。
- **舵机速度按钮:**进行舵机位置调试时,每个动作执行的预设时间。
- **新增专案按钮:**新增一个舵机专案档。
- **开启专案按钮:**开启一个已经存在的舵机专案档(svproj)。
- **储存档案按钮:**储存舵机专案档。
2.2. 功能区说明¶
- 功能区有五个子页面,分别是【舵机】、【位置】、【动作】、【宏】和【控制】,如下图:
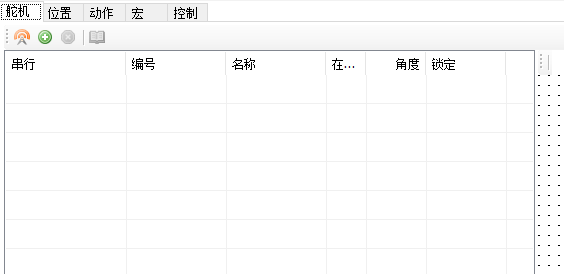
2.3. 舵机工作区说明¶
- 舵机工作区有左右两区,左侧为舵机列表区,右侧为图形配置区。
2.3.1. 舵机列表区¶
如下图:
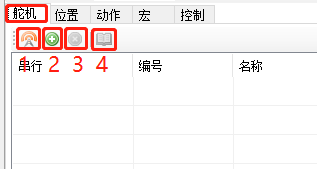
按钮说明:
上图按钮**1**到按钮**4**按钮分别为:
- **扫描舵机:**扫描目前安装在控制板且上电的舵机。
- **新增舵机:**新增一个或一组指定编号的舵机,按下按钮会出现对话框,如下图:
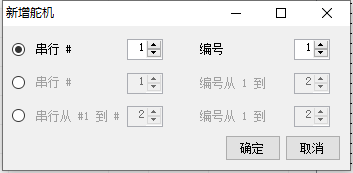
这些新增的舵机也许不存在于目前的装置,可由专案档进行后续的模拟测试。
- **移除舵机:**在选定舵机后该按钮才起作用,可删除选定的舵机。若将在线中的舵机删除,重新扫描后仍会出现。
- **量测角度:**按下后会反馈舵机当前角度。
2.3.2. 图形配置区¶
如下图:
按钮说明:
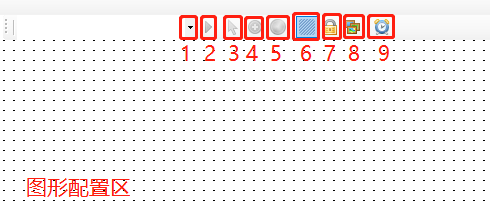
上图按钮**1**到按钮**9**按钮分别为:
- **选取范围:**可选择的选项有“所有舵机”、“已选择的舵机”、以及个别选取的串列舵机,如:“串列#1”。
- **到此位置:**可令舵机转动到设定的角度。
- **选择舵机:**需搭配【选取范围】下拉选单,以选择指定舵机。
- **新增位置:**可新增一组舵机位置。
- **设定界面颜色:**改变舵机图示颜色。
- **网格模式:**开启图形配置区网格,提供对齐功能。
- **锁定画面:**开启本模式舵机图示将不可拖拽。
- 多选: 在点选一个舵机后,再次点选其他舵机将一并选取。
- **实时模式:**再次模式下拖拽角度滑杆,舵机将直接动作到指定角度。
2.4. 位置工作区说明¶
2.4.1. 位置列表工具列¶
如下图:
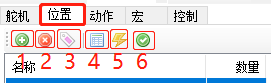
按钮说明:
上图按钮**1**到按钮**6**按钮分别为:
- **新增位置:**可新增一组舵机位置。
- **移除位置:**在选定位置后本按钮才起作用,可删除选定的位置。
- **重新排列位置名称:**按下后可是位置编号重整,如已由操作者自行命名将略过排序。
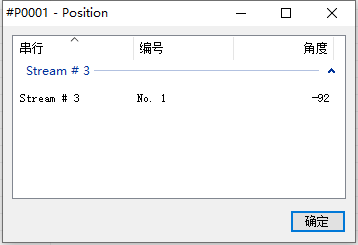
- 位置细节:在选定位置后,按下按钮后出现位置细节视窗图,如下图:
- 到此位置:可令舵机转动到目前显示的角度。
- **转换为动作:**按下按钮后,可将此位置添加到动作页面。
2.5. 动作工作区说明¶
动作列表有左右两区,左区为动作列表区,右区为动作细节显示区。
2.5.1. 动作列表区¶
如下图:
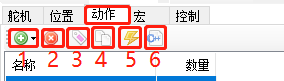
按钮说明:
上图按钮1到按钮6按钮分别为:
- 新增动作:可通过【以测量增加动作】或【从位置增加动作】来新增动作。
- 移除动作:在选定动作之后,按下按钮可删除选定的动作。
- **重新排列位置名称:**按下后可是位置编号重整,如已由操作者自行命名将略过排序。
- 复制动作:在选定动作之后,按下按钮可直接复制选定的动作作,也支持多选复制。
- 执行动作:在选定动作之后,按下按钮可使舵机执行选定的动作。
- **产生动作定义:**按下按钮会弹出对话框,如下图:
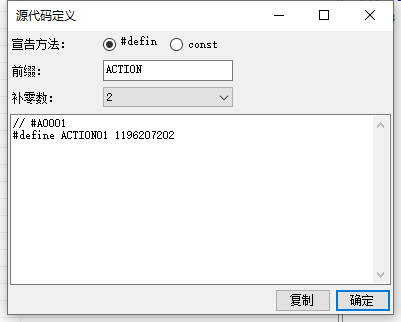
在源代码定义对话框中,可以直接查看动作宣告码,并且可复制取值。
2.5.2. 动作细节显示区¶
如下图:
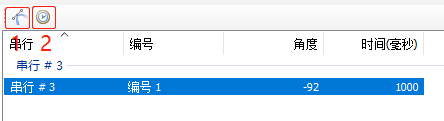
选定动作后,选定的动作详情则会显示在此区,可动过双击某颗编号舵机角度和时间或多选舵机,以更改舵机动作的角度和时间。
按钮说明:
上图按钮**1**到按钮**2**按钮分别为:
- 修改角度:选取某颗编号舵机,按下按钮可更改某颗舵机动作的角度。也可多
选舵机,按下按钮可批次更改选取的舵机动作的角度。
- 修改时间间隔:选取某颗编号舵机,按下按钮可更改某颗舵机动作的时间。也可多
选舵机,按下按钮可批次更改选取的舵机动作的时间。
2.6. 宏(动作组)工作区说明¶
宏(动作组)页面有左右两区,左区为宏列表区,右区为宏编辑区。
2.6.1. 宏列表工具列¶
如下图:
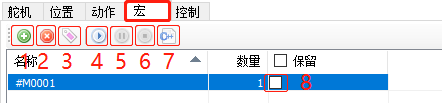
按钮说明:
上图按钮**1**到按钮**8**按钮分别为:
- 新增宏:可新增一个宏,下拉有:新增动作命令、新增宏命令,以及新增延迟命令三个选项;(新增动作命令:适合单一动作加入);(新增宏命令:实现循环功能,可加入除自己之外,且无內含其他宏的宏作為命令(一级宏),并设定执行次数);(新增延迟命令:加入延时,以毫秒计)。
- 移除宏:在选定宏之后,按下按钮可删除选定的宏。
- **重新排列位置名称:**按下后可是位置编号重整,如已由操作者自行命名将略过排序。
- 执行宏:在选定宏之后,按下按钮可使舵机执行选定的宏动作。
- 暂定宏:按下按钮可使舵机暂停宏动作,再次按下按钮可使舵机继续宏动作。
- 停止宏:停止舵机宏动作。
- 产生宏定义:按下按钮后出现对话视窗图,如下图:
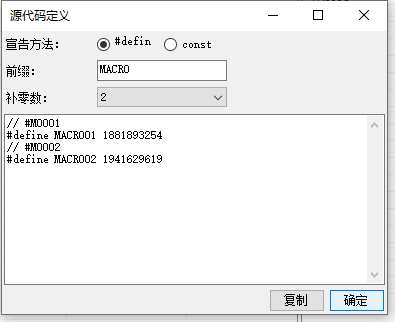
在源代码定义对话框中,可以直接查看宏宣告码,并且可复制取值。
- 保留:勾选此栏表示此宏无论是否对应到按钮事件,必定会写入控制板。此栏不勾选,则此宏必须被对应至按钮事件才能被写入。
2.6.2. 宏编辑区¶
如下图:

按钮说明:
上图按钮**1**到按钮**5**按钮分别为:
- 新增命令:下拉选项有“新增动作命令”、“新增宏命令”、“新增延迟命令”。可在选定的宏中新增上述选项內容
- 移除命令:选定宏中某条內容之后,按下按钮可刪除该条內容。
- 上移命令:选定宏中某条內容之后,按下按钮可使该条內容上移。
- 下移命令:选定宏中某条內容之后,按下按钮可使该条內容下移。
- 单步动作:选定宏中某条动作內容之后,按下按钮可单独执行该动作,点击宏和延时时,该功能无效。
2.7. 控制工作区说明¶
控制页面有左右两区,左区为控制列表区,右区为摇杆按钮设置区。
2.7.1. 控制列表工具列¶
如下图:

按钮说明:
上图按钮**1**到按钮**5**按钮分别为:
- **摇杆按钮对应表:**下拉可选择需要的摇杆按钮对应表。
- 新增摇杆对应表:可新增一个摇杆对应表。
- 移除摇杆对应表:在选定摇杆对应表之後,按下按钮可刪除选定的摇杆对应表。
- 汇出数据到控制板:可将舵机专案资料汇出至控制板。
- 从控制板汇入数据:可由控制板储存的舵机专案导入程式。
2.7.2. 摇杆按钮设置列表¶
每个按钮有3种控制方式:【按下】、【长按】和【放开】。
如下图:
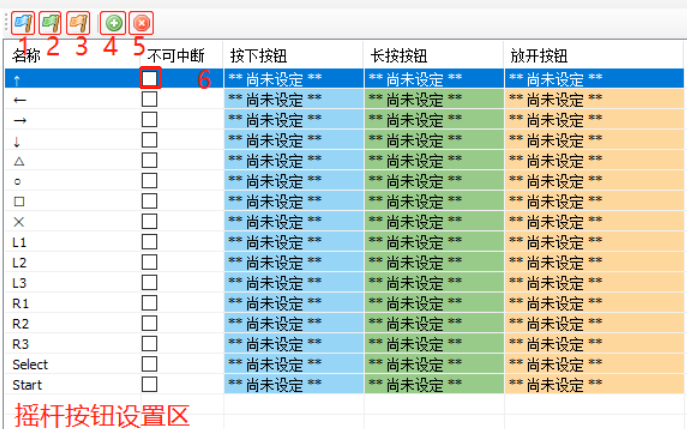
按钮说明:
上图按钮**1**到按钮**6**分别为:
- 按下按钮:在选定摇杆按钮后,可在【按下按钮】工具列设定摇杆按钮的宏。
- 长按按钮:在选定摇杆按钮后,可在【长按按钮】工具列设定摇杆按钮的宏。
- 放开按钮:在选定摇杆按钮后,可在【放开按钮】工具列设定摇杆按钮的宏。
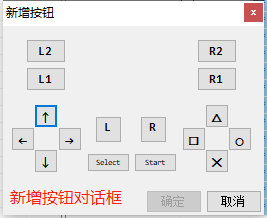
- 新增按钮:可新增按钮或新增组合按钮,按下按钮后出现对话框,如下图所示:
- 移除按钮:在选定摇杆按钮后,按下按钮可刪除选定的摇杆按钮。
- 不可中断:勾选此栏,则同一按钮的各事件对应宏,不得后令压前令(先发的命令中止,执行后发的宏命令),需前一个宏执行完毕后才可执行。此栏不勾选,则各动作执行遵循后令压前令规则。