常见问题解决¶
1. 无法扫描出舵机的解决办法¶
1.1. 连接顺序确认¶
首先打开机器人控制板上的电源开关,电源指示灯红灯亮,然后把USB线小的一头连接到控制板,另一头连接到电脑,然后打开电脑上的动作编辑器软件。
1.2. Micro USB 数据线确认¶
有些USB数据线只有充电功能,而没有数据传输功能,是无法进行机器人与电脑的连接的;所以请使用有数据传输功能的数据线,或者使用我们标配的数据线。
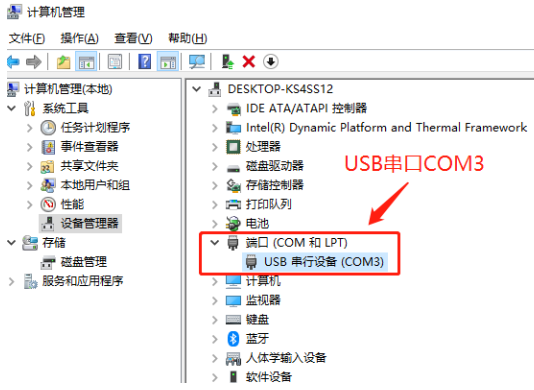
1.3. USB驱动确认¶
USB串口驱动没有安装,也是无法连接上机器人的,请在电脑设备管理器中确认USB串口驱动有无安装。我的USB串口是COM3,每个人的USB串口不一样显示的COM口就不一样。如下图:
2. 手柄无法连接机器人解决办法¶
2.1. 手柄电池确认¶
打开手柄电池后盖,将手柄装上两节7号电池。
2.2. 检查控制板是否有USB接收器¶
将USB接收器接到机器人控制板上。
2.3. 控制板和手柄电源开关确认¶
打开机器人控制板电源开关和手柄电源开关。
2.4. 手柄指示灯确认¶
打开控制板电源开关和手柄电源开关,机器人会自动连接手柄,手柄绿色指示灯RX由闪烁变为常亮,表示手柄连接成功。
如果机器人自动连接失败,请按下手柄上的模拟按键**”analogy”**,待手柄绿色指示灯RX由闪烁变为常亮,此时可以手柄操控机器人。
3. 机器人动作异常处理¶
3.1. 在线调试时舵机不受控制¶
请检查软件上舵机是否显示为断线,再查看是否选中**实时模式**;再则机器人断电后转动不受控制的舵机,若正反转时存在阻力过大,则舵机损坏。
3.2. 离线手柄操作时,舵机不转动¶
离线手柄操作时,舵机不转动,请检查舵机连接线是否松动后再次上电;在断电后转动舵机,是否转动时相比其他舵机阻力大,如果是,则该舵机可能损坏。
3.3. 使用使用一段时间后,出现动作异常¶
如果使用一段时间后,出现动作异常,请检查结构上的螺丝是否有松动,若无松动再检查转动舵机,若阻力过大,则说明舵机可能已经损坏。
4. 机器人“滴”“滴”报警¶
4.1. 电池无电判断¶
机器人使用过程中出现“滴”“滴”声,并伴随着电源指示灯(红灯)闪烁,此为电池低压报警,请及时给电池充电,避免电池过放电,导致电池损坏。
4.2. 电池满电判断¶
电源适配器指示灯显示为绿色状态表示已充满,如果显示为红色则表示正在充电。